Angew. Chem. Int. Ed. | 基于材料-结构协同作用的体热与自然阳光响应型动态液晶弹性体自持致动器
今天与大家分享一篇发表在Angew. Chem. Int. Ed.上的文章,标题是“基于材料-结构协同作用的体热与自然阳光响应型动态液晶弹性体自持致动器”。本文的通讯作者为四川大学肖尧予研究员、蒲苇教授与舍布鲁克大学赵越教授。
液晶弹性体(LCEs)因其快速、大变形、可逆和可编程的响应特性,正在推动智能软体机器人的发展。与传统LCE软体机器人不同,新型的物理智能LCE能够通过内置的感知、判断、行动和调节过程,在不受控的环境中自主、连续和自适应地运行。然而,当前的自持续LCE致动器大多依赖于高功率人工能量源(如高温和强光),这不仅难以在大面积或长时间内维持,还存在能源效率低下和对环境造成热损伤或光损伤的问题。因此,使用自然且可持续的能量源(如阳光和人体热量)来驱动自持续致动器显得尤为重要。
尽管在低能耗自持续液晶弹性体致动器领域已取得进展,主要集中在太阳能驱动的自振荡器和向日性跟踪系统,但进一步降低驱动能量阈值以实现更多低能量刺激和运动模式仍是挑战。目前,低转变温度的LCE通常应变率低,且低能量源加热慢、温差小,进一步限制了应变率。为突破这些限制,研究者提出材料与结构协同策略,通过优化结构设计来弥补材料性能不足,实现温和刺激下的高应变率。
受先前研究启发,本研究合成了一种兼具低转变温度和低温可重编程/可再加工特性的Diels-Alder键交联的液晶弹性体(DALCE)。图1a展示了其分子结构,C6BAPE和RM257作为液晶单体通过Diels-Alder反应形成交联结构,这些特性使其能制造复杂结构,如扭曲缠结结构,提升应变率,实现低能耗自维持致动器。图1b展示了掺杂多壁碳纳米管(MWCNTs)的DALCE在阳光下的光响应性。在制造时,DALCE可利用机械成形和4D打印重构液晶排列及致动器形态,开发了线状、环状扭曲纤维和双曲面薄膜致动器,用于阳光和体温驱动的自维持运动。例如,低Tni的DALCE在0℃和30℃间切换时能快速显著收缩/伸长,在自然阳光或温暖皮肤(图1c和1d)上自行卷曲,在环境温度或阳光下自行振荡,还能作为载体运输物体。
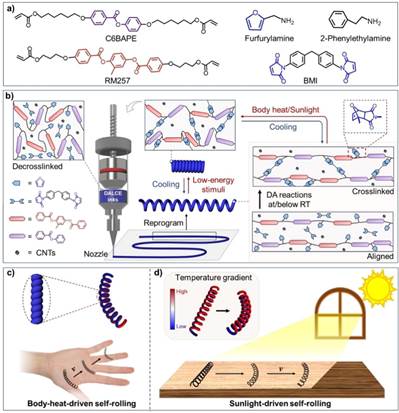
图1.(a)用于制备低Tni的DALCEs的材料组分的化学结构。(b)掺杂CNT的DALCE致动器的重编程过程示意图:首先通过可逆Diels-Alder(retro-DA)反应在加热条件下使DALCE油墨脱交联,随后进行纤维挤出;在室温下完成液晶取向排列/致动器成型,并通过室温或低于室温的DA反应实现网络自锁定。重编程后的扭-卷式致动器可借助材料与结构的协同效应,在低能量刺激下实现大幅驱动。(c)DALCE致动器直接在温暖皮肤上或(d)在自然阳光下自卷曲的示意图。
图2展示了DALCE材料作为驱动基底的特性。通过迈克尔加成反应聚合并用双马来酰亚胺(BMI)交联形成DA加成物。研究发现,随着C6BAPE含量(X)增加,DALCE的玻璃化温度(Tg)降低,放热峰在100-140℃出现。当X从0增至75时,Tni从58.2℃降至30.5℃,后又升至36.5℃(X=100),这与先前研究一致,归因于C6BAPE的弱分子间作用及与RM257的共晶效应。同时,交联导致Tni意外下降(图2b),而Tg上升。此外,随着C6BAPE含量增加,DALCE的杨氏模量降低,断裂伸长率先增后减(图2c和2d),其中DALCE-C75表现出最佳机械性能。
图2e比较了DALCE-C50和DALCE-C75的热机械响应,结果显示DALCE-C75的最大收缩应变略高且驱动温度略低。在50.3℃时,DALCE-C75达到95%的总收缩,而DALCE-C50在52.9℃时达到相同比例。图2f展示了DALCE-C75在10个循环中稳定的驱动应变,归因于DA键的稳定性。图2g显示在20℃时材料呈现液晶相,而在50℃时液晶相被破坏。图2h揭示了不同C6BAPE含量对材料相特性的影响,其中DALCE-C75具有明显的层状间距,确认其液晶相。图2i显示调整BMI含量可以改变交联密度,进而影响驱动应变。
向DALCE-C75中添加4%的MWCNTs构建了DALCE-C75-CNT,使其能在阳光下激活并增强机械强度,尽管延伸应变有所降低,但断裂伸长率仍满足应用要求。图2j展示了其热可逆性,并通过机械性能测试验证了自锁定过程。DALCE-C75-CNT在7次重处理后仍保持稳定驱动性能。此外,该材料可重编程为不同致动器,如单膜实现四种可逆展开模式(图2k),并可作为4D打印墨水(图2l)。这些特性使其成为可持续且可定制的智能材料。利用其低Tₙᵢ和重编程特性,本研究通过结构优化(如HOTC结构)提升了DALCE-C75-CNT致动器的性能。HOTC致动器在30℃时延伸应变890%,应变速率487.5%/s(图2m),显著优于传统结构。在67 mW/cm²模拟阳光下,其延伸应变905%,应变速率33%/s(图2n),光强增加至86 mW/cm²时,应变和速率进一步提升。这表明结构优化和材料特性协同可显著增强驱动性能。
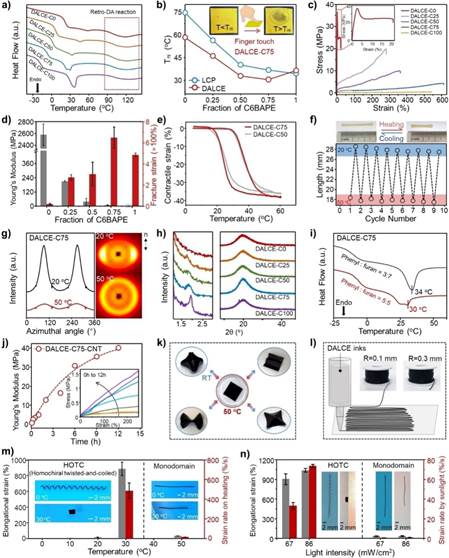
图2.(a)DALCE-CXs在第二次升温过程中的DSC曲线。(b)DALCE-CXs及其预聚物的Tni变化图。插图:用手指触摸加热时DALCE-C75的透明度变化。(c)DALCE-CXs的拉伸应力-应变曲线及(d)杨氏模量与断裂应变。(e)单域DALCE-C75和DALCE-C50在加热/冷却循环中的收缩应变,由DMA在0N等应力模式下记录。(f)单域DALCE-C75条带可逆收缩/伸长行为(上图)及其在十次驱动循环中的长度变化(下图)。(g)单域DALCE-C75条带在20℃和50℃时的方位角衍射曲线(反映向列有序度)及2D-XRD图样,双箭头表示薄膜拉伸方向。(h)DALCEs的1D-XRD图谱,包含低角区(1–10°)和宽角区(5–90°)的信号段。(i)不同苯基/呋喃摩尔比的DALCE-C75的DSC曲线。(j)DALCE-C75-CNT的杨氏模量随22℃下DA键重组时间的变化,插图为其对应的拉伸曲线。(k)照片展示DALCE-C75-CNT的可重构性:同一片薄膜可重编程实现四种可逆的折叠-展开模式。(l)热脱交联DALCE-C75-CNT作为可重复4D打印油墨的示意图。插图:挤出半径为0.1mm和0.3mm的纤维。(m,n)由DALCE-C75-CNT重编程的同手性扭转-卷绕(HOTC)致动器,具有增强的变形响应。(m)在温和温度及(n)阳光下的伸长驱动应变与应变速率。插图展示HOTC与单域致动器的变形行为:左侧HOTC致动器的线圈直径(Dcoil)和纤维直径(Dfiber)分别为2.8mm和0.30mm;右侧分别为1.6mm和0.30mm。
基于HOTC结构的DALCE-C75-CNT致动器在多种皮肤表面实现了自维持运动(图3a)。在35.2℃的手掌上,它以3.78毫米/秒的速度自主向手指滚动(图3b和3c)。在温度较低的手背(33.3℃)和手臂(32.5℃),滚动开始稍晚,但速度超过手掌,分别为3.84毫米/秒和3.14毫米/秒(图3c和3d)。为确认低温驱动的自滚动能力,在30℃的温控金属板上测试了致动器(图3e),其以0.76毫米/秒的速度持续滚动(图3f),表明即使温差较小,低温也能有效驱动运动。此外,图3g和3h展示了一种基于HOTC环结构的体温驱动自适应腕带,初始直径143毫米的腕带挂在手臂上时,以3.25毫米/秒的速度收缩以适应78毫米的手臂直径,然后以0.14毫米/秒的平均速度水平移动。
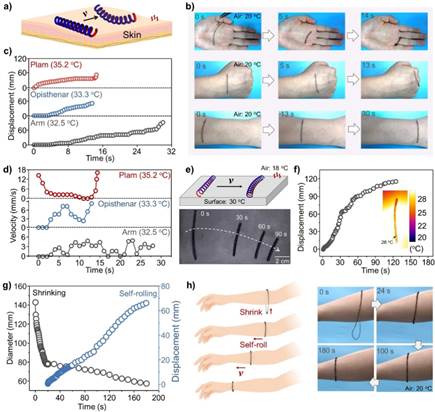
图3.(a)基于DALCE-C75-CNT的HOTC致动器在体温作用下实现自卷曲的示意图。(b)照片展示该HOTC致动器(Dcoil=2.7mm,Dfiber=0.27mm)在手掌、手背和前臂上的自卷曲过程。(c)和(d)分别给出对应的位移-时间曲线与瞬时速度-时间关系。(e)示意图(上)与延时合成照片(下)显示一只HOTC致动器(Dcoil=3.4mm,Dfiber=0.68mm)在30℃平面上自主滚动的过程,(f)为其位移-时间曲线。(g,h)具有闭合环拓扑的HOTC致动器(Dcoil=3.0mm,Dfiber=0.67mm)收缩以贴合手臂并自卷曲:(g)给出随时间变化的环直径与位移数据;(h)为对应的运动照片。
基于DALCE-C75-CNT的线性HOTC致动器在阳光下能自主滚动,但易出现原地变形或短距离运动,因阳光加热周围环境,减小了致动器截面的温差,降低了温度/应变梯度。为此,本研究采用环形HOTC致动器,在垂直圆柱表面实现阳光驱动的自主滚动(图4a和4b),平均速度2.66毫米/秒,遮光时运动停止(图4c和4d)。圆柱表面滚动稳定,阳光越强,速度越快(图4e)。该致动器适应多种圆柱表面(图4f),小/光滑圆柱滚动更快。它还能在水平阳光下以0.88毫米/分钟的速度水平滚动(图4g和4h)。以往研究建立了高Tni LCEs的自滚动机制:加热一侧形成温差和应变梯度,使致动器弯曲并滚动。对于体温或阳光驱动,因温差小,需通过材料和结构效应增强主轴方向的驱动应变和应变率,以放大应变梯度,实现低能耗滚动。
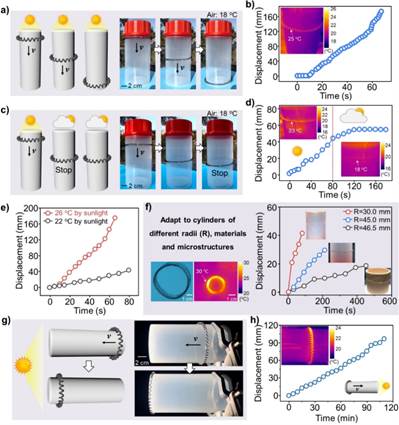
图4.(a)环形HOTC致动器(Dcoil=5.6mm,Dfiber=1.50mm)在自然阳光照射下沿圆柱体稳定向下滚动的示意图(左)与实拍照片(右);(b)对应的位移–时间曲线。(c)同一环形HOTC致动器在自然阳光“开/关”控制下的自滚动运动示意图(左)与实拍照片(右);(d)对应的位移–时间曲线。(e)同一环形HOTC致动器在不同强度阳光加热下(22℃与26℃)的位移–时间曲线。(f)自滚动行为对不同半径、材质及表面纹理圆柱体的适应性。(g)环形HOTC致动器(Dcoil=5.3mm,Dfiber=1.20mm)在水平放置的圆柱体上自主滚动的示意图(左)与实拍照片(右);(h)对应的位移–时间曲线。
为展示材料-结构协同作用的潜力,本研究基于DALCE-C75-CNT设计了多种低能耗自振荡运动和任务执行功能(图5)。例如,一端固定在冰袋上的HOTC致动器在空气中展现出自主呼吸般的收缩-扩张振荡(图5a和5b)。此外,将其一端锚定后,自由端可进行周期性扭转-收缩耦合运动(图5c和5d)。同时还利用DALCE-C75-CNT和胶带制成闭环拓扑致动器,在模拟阳光下实现自主摆动(图5e和5f)。通过使用不对称弯曲的双层丝带,实现了卷曲-舒展的节律运动(图5g和5h)。这些致动器还能运输货物,如在模拟阳光下以3.06毫米/秒的速度运输0.7倍自身重量的负载(图5i和5j)。这些实验表明低Tₙᵢ材料与优化结构设计相结合,可构建低能耗自维持致动器。
与其它LCE系统相比,DALCE具有显著优势。其室温可重编程性和易加工性,结合共价网络的稳定性,使其在结构优化和适应性调节方面表现出色。同时,其热调交联度简化了复杂结构的编程,避免了高温重编程导致的材料损伤风险。这些特性使DALCE在构建自维持系统方面具有创新优势,为低能耗LCE致动器的发展提供了新思路。

图5.(a)两端固定于冰袋、悬挂在22℃空气中的HOTC致动器(Dcoil=2.1mm,Dfiber=0.29mm)的“自呼吸”形貌变化;(b)对应的区段高度随时间的变化曲线。(c)一端固定于冰袋、悬挂在22℃空气中的HOTC致动器(Dcoil=1.7mm,Dfiber=0.25mm)的自扭转振荡;(d)对应的长度与扭转角随时间的变化。(e)由DALCE-C75-CNT/Kapton双层条带粘接而成的环形致动器在97mWcm⁻²模拟阳光下产生的自摆运动;(f)对应的形变角度随时间的变化。(g)非对称弯曲的DALCE-C75-CNT/Kapton双层条带在97mWcm⁻²模拟阳光下进行的自主卷曲-展平循环;(h)对应的角度-时间曲线。(i)在83mWcm⁻²模拟阳光下,HOTC致动器(Dcoil=9.1mm,Dfiber=1.93mm)自滚动并运送载荷;(j)对应的位移-时间曲线。
综上所述,这项研究介绍了一种低Tₙᵢ、基于Diels-Alder键交联并掺杂MWCNTs的液晶弹性体DALCE-CX-CNT,它兼具低能耗响应性和高可重编程性。DALCE-C75-CNT的Tₙᵢ约32℃,在50℃下有约36%的延伸应变,可制成线状或环状HOTC结构。通过材料与结构协同,HOTC致动器在30℃时应变幅值和速率分别达约900%和480%/s,能通过体温、环境温度或阳光实现自驱动运动和变形。例如,线状HOTC纤维可在手掌、手背和手臂上自主滚动,环状HOTC纤维可在手臂上先收缩再滚动,还能在模拟阳光下水平滚动,并在不同垂直圆柱上展现阳光调控的自滚动行为。此外,环境温度驱动的自振荡和模拟阳光下的货物运输也已实现。这些成果凸显了低Tₙᵢ DALCE作为多功能平台的潜力,为发展低能耗自主软体机器人、生物医学热致动器、可穿戴设备和自然能量收集系统提供了新途径。
文字:周慧
审核:叶曦翀
参考文献:DOI:10.1002/anie.202500527
https://doi.org/10.1002/anie.202500527