Adv. Mater. | 液晶弹性体-液态金属复合材料:通过感应加热实现超快、无束缚和可编程的驱动
今天与大家分享一篇发表在Advanced Materials上的文章,标题是“液晶弹性体-液态金属复合材料:通过感应加热实现超快、无束缚和可编程的驱动”。本文的通讯作者为斯坦福大学机械工程系的Ruike Renee Zhao教授。
刺激响应材料能够响应外部刺激(如磁场,光或热)改变其形状和物理特性,实现一系列新颖的软机器人功能。液晶弹性体(LCE)能够在温度变化下产生高达40-50%的可编程和可逆的大驱动应变。当加热到其转变温度以上时,会触发向列到各向同性的相变,诱导其介晶从各向异性到各向同性状态的微观结构重排,从而沿取向产生宏观收缩。尽管已经通过焦耳热实现了复杂的LCE结构驱动,但LCE在需要外接线路的封闭环境中的应用仍受限。对于使用热风枪、热台和热水浴的方法,整个样品的温度均升高,只能实现一种变形模式。光热加热可以实现更局部的能量传输以进行选择性致动,但在光无法进入的致动环境中也具有局限性。
感应加热是一种用于材料的快速加热的策略。高频磁场可以与LCE结合进行无限制和可编程的加热,由于磁场有穿透物体的能力,使LCE可在受限或封闭的环境中驱动。通常有两种感应加热机制,即磁滞损耗和涡流。磁滞损耗是将铁磁材料磁化和退磁循环的能量损耗转换为热量。通过磁滞损耗加热软材料通常是通过在软聚合物基质中嵌入磁性颗粒(例如氧化铁颗粒)来实现的。然而由于其加热效率有限,聚合物刚度的显著增加,以及制造过程中聚合物链排列的潜在破坏阻碍了驱动能力。而在不断变化的磁场下,导电材料中的感应电流,即涡流也可产生热量。液态金属(LM)作为热响应软材料(如LCE)感应加热的导电材料,由于具有超快加热能力,可实现快速致动,并且LM对材料的刚度影响可忽略不计,具有巨大的优势
在这项工作中,作者报告了一种新型液晶弹性体-液态金属(LCE-LM)复合材料,该复合材料可通过涡流感应加热实现超快,无束缚和高度可编程的驱动。该复合材料由两个3D打印LCE层以及夹在之间的LM组成。LCE通过直接墨水书写(DIW)打印,LM被喷涂到掩模上,形成可编程的LM图案。涡流加热效率可以通过LM的厚度来调节,LM的厚度可以通过喷涂的LM层数来量化。当受到高频交变磁场的影响时,复合材料可以在几毫秒内启动。通过移动磁场,可以在空间上控制涡流以实现选择性驱动。此外,加热方式可以通过对LM厚度分布进行编程来实现。LCE-LM复合材料可进一步用于弹出式结构的多模态变形,地面全向机器人运动,水中目标物体操纵和水中爬行。
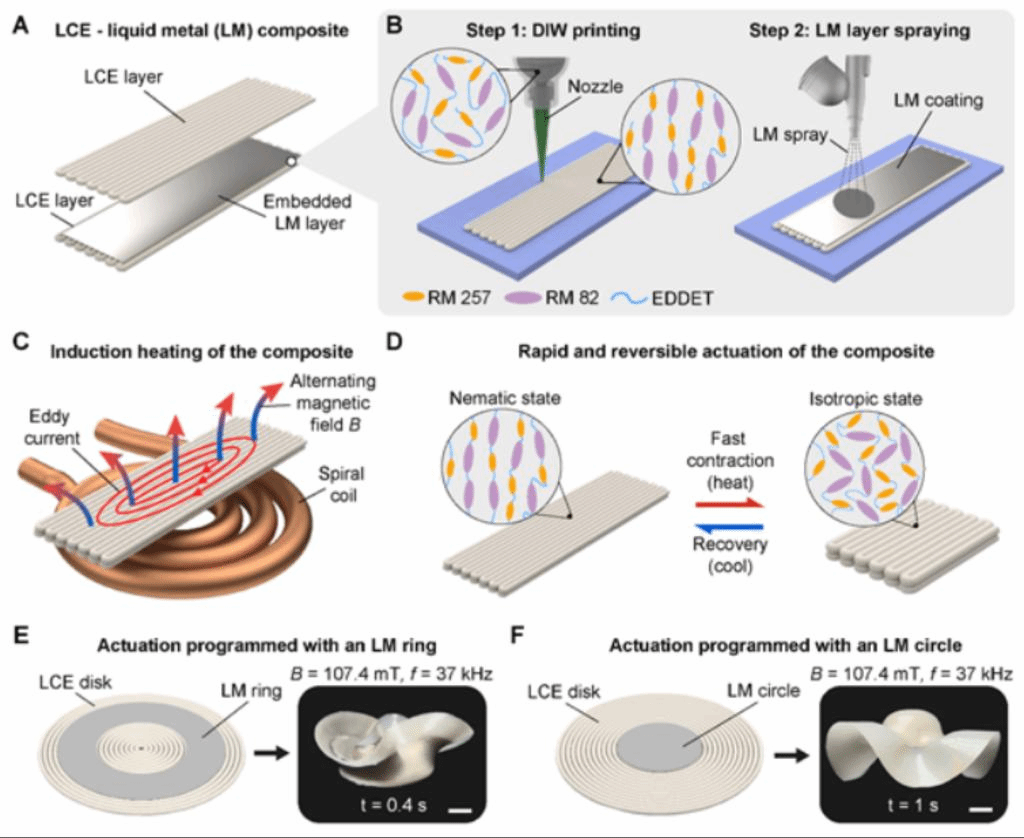
图1、LCE-LM复合材料制造、感应加热机制以及通过设计的LM掩模进行编程驱动。(A)由两个LCE层和夹在之间的LM组成的LCE-LM复合材料的结构图。(B)LCE层的DIW打印和LM喷涂。(C)复合材料感应加热示意图,其中高频交变磁场在LM中产生感应涡流。(D)快速收缩(复合材料加热)和恢复(复合材料冷却)示意图。在B=107.4mT和f=37kHz下,(E)表面具有同心LM环的LCE盘和(F)表面上具有同心LM圆的LCE盘的原理图和编程致动状态。LCE磁盘圆周对齐。比例尺:5mm
制造的复合材料(图1A)由两个LCE层和夹在之间的LM组成,两个LCE层通过DIW进行3D打印。印刷的LCE在驱动温度为120°C下具有507kPa的剪切模量。如图1B所示,LCE介晶通过从打印喷嘴挤出LCE纤维期间产生的剪切应力进行对齐。LCE驱动方式可以通过对DIW打印路径进行编程来设计。然后通过不同图案的掩模将LM喷涂到印刷LCE的顶部(图1B)。另一个印刷的LCE层放置在顶部以覆盖LM。当垂直于LM面施加高频交变磁场时,通过涡流产生欧姆损耗(图1C)。温度可以在几毫秒内增加到120°C以上(40%LCE应变),在此期间LCE从向列状态过渡到各向同性状态,由于LM的刚度可以忽略不计,因此产生超快的大幅度形变。冷却后,LCE恢复到向列状态和原始长度(图1D)。通过在LCE层上设计LM图案,可有效地对致动进行编程。如图1E所示,打印的LCE盘和LM环同心放置。当磁场强度为B=107.4mT,频率f=37kHz时,圆盘的外边缘在0.4s内向上变形为花状。当LM被打印为LCE的同心圆时,样品在1s内变形成帽状(图1F)。
LM感应加热产生的热量由LM图案的几何形状、厚度以及磁场强度和频率决定。通过加热相同尺寸(15mm×15mm)但厚度不同的LM方块来表征LM的感应加热效率,单层厚度约为10μm。如图2A所示,首先在B=41.1mT和f=51kHz的几乎均匀的磁场下加热10层(~100μm厚)的正方形LM。红外成像记录的温度分布与模拟的欧姆损耗分布一致,表明了由高频交变磁场引起的趋肤效应,边缘温度较高。如图2B所示,在相同的交变磁场下,总欧姆损耗几乎随厚度线性增加。在图2C中,观察到加热速度随着LM层数的增加而增加。8层的LM(~80μm厚)温度在不到1s的时间内升高到100°C以上,30层LM(~300μm厚)可在不到0.3s内达到100°C。如图2D所示,使用较小的螺旋线圈产生B=152.8mT和f=46kHz的集中交变磁场。通过将线圈放置在三个不同的位置,在目标区域发生局部加热,可以加热位于不同位置的两个7层(~70μm厚)正方形LM。当线圈放置在位置1时,仅在顶部正方形LM中发生集中加热,而在底部正方形LM中未观察到加热。当线圈移动到位置2时,在两个正方形之间,加热集中在两个正方形LM的边缘。最后,在位置3,仅观察到底部正方形LM的加热,未观察到顶部正方形LM的加热。
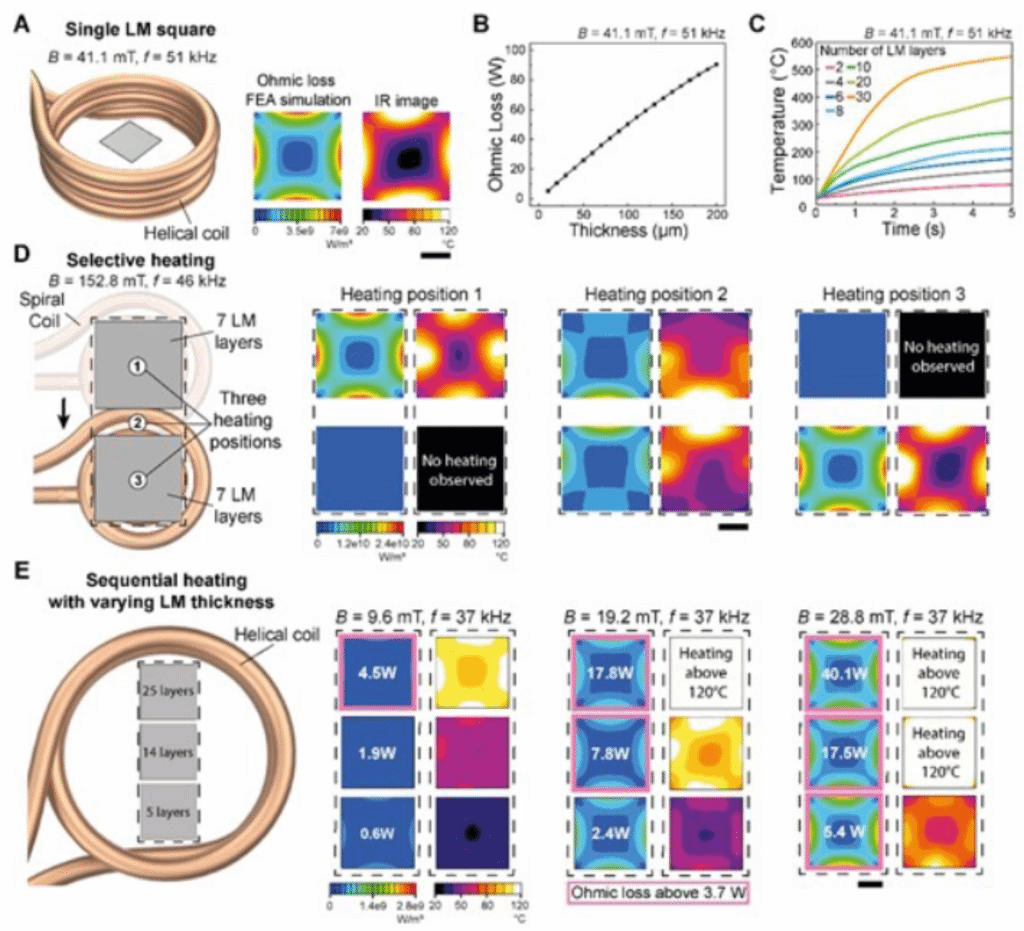
图2、用于选择性和连续加热的正方形LM(15mm×15mm)感应加热的表征。(A)10层正方形LM的感应加热及其有限元分析预测的欧姆损耗分布和在B=41.1mT和f=51kHz下测量的温度分布。(B)LM的总欧姆损耗与LM厚度/LM层数。(C)LM的测量温度与时间的关系,LM的厚度/LM层数各不相同。(D)在B=152.8mT和f=46kHz下,当线圈放置标记为1、2和3的三个不同位置时,两个7层LM方块选择性加热期间的欧姆损耗和测量的温度分布。(E)在f=37kHz时增加磁场强度下,具有不同层数(25、14、5层)的三个正方形LM的连续加热期间的欧姆损耗和测量的温度分布。比例尺:5mm
由于感应加热速度与LM层的数量成正比,因此可以通过在逐渐增加不同LM层数的磁场区域内进行连续驱动。将三个不同厚度的正方形LM依次在螺旋线圈内加热到120°C以上,磁场频率f=37kHz,如图2E所示,LCE达到40%驱动应变。样品顶部LM在B1=9.6mT下达到120°C,然后在B2=19.2mT下两个正方形LM达到,最后在B3=28.8mT下所有三个正方形LM均达到。为了确定连续加热的LM层数,使用比热方程计算临界欧姆损耗,超过该损耗,正方形LM能够在不到2s的时间内将复合材料的LCE层加热到120°C。发现该临界欧姆损耗为3.7W。然后进行电磁有限元分析仿真,以确定在不同磁场振幅下,每个平方的总欧姆损耗达到3.7W所需的LM层数。根据该计算,三个正方形(在图2E中垂直放置)应由25(~250μm厚),14(~140μm厚)和5(~50μm厚)层组成,从上到下。可以看出,当磁场从9.6mT增加到19.2mT,最后增加到28.8mT时,三个正方形依次分三步加热到120°C以上,从层数最多的顶部正方形LM开始,到顶部的两个正方形,最后到所有三个正方形。
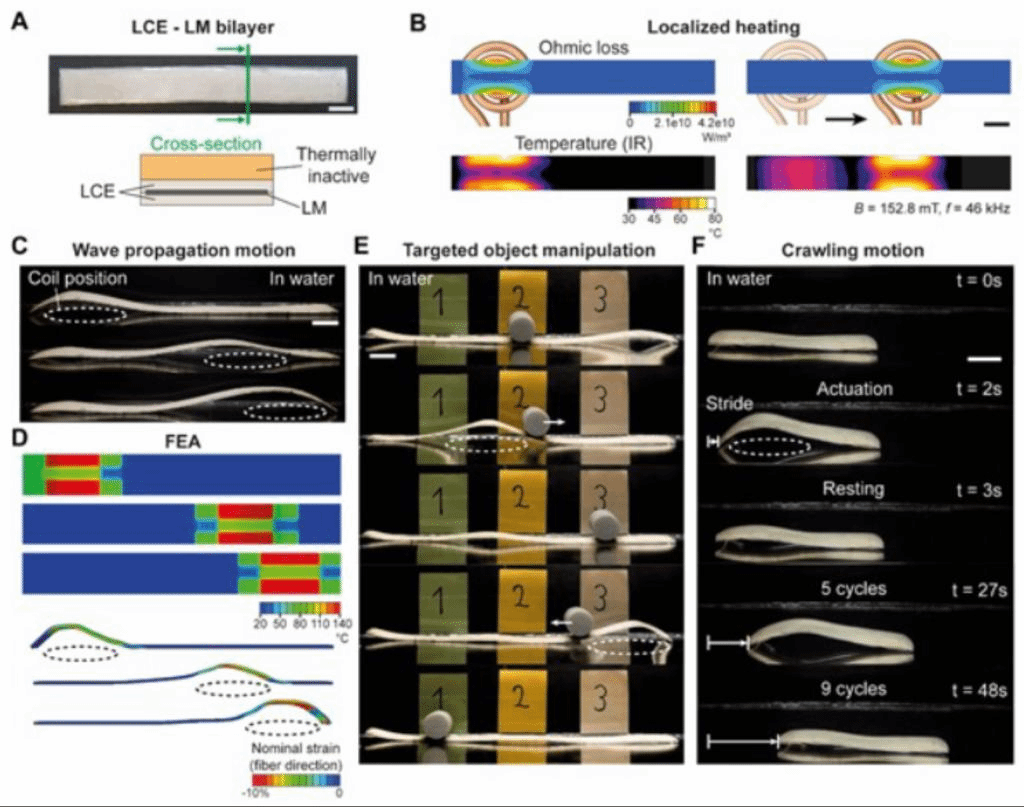
图3、LCE-LM双层样条的水中驱动。(A)截面示意图展示样品及其成分。样品由两个LCE层组成,中间有纵向排列的介晶和夹在中间的6层LM。非热活性材料层粘合在LCE-LM复合材料的顶部。比例尺:10mm。(B)由B=152.8mT和f=46kHz的螺旋线圈局部加热的LM模拟欧姆损耗分布和测量温度分布。比例尺:10mm。(C)通过在水中移动样品下方的线圈实现的波状运动。比例尺:10mm。(D)有限元分析中的温度分布和样品的模拟波状运动。(E)通过程序化加热对水中的圆筒样品进行操作。比例尺:10mm。(六)通过反复加热和冷却样品进行水中爬行运动。比例尺:15mm。
由于室温水具有高导热性和热容量,传统的驱动策略(如焦耳加热,光热加热或热风枪)很难实现LCE在室温水(测量值为23°C)中的快速可逆驱动。通过移动线圈重新定位磁场,使涡流能够在水中实现可控的LCE运动。作者制造了一个LCE-LM多层材料,如图3A所示,由6层LM(~60μm厚)组成,夹在两个LCE条之间,中间通过DIW纵向排列。顶面与一层非热活性材料(剪切模量890kPa)粘合,使样品在驱动时弯曲。如图3B所示,欧姆损耗分布和产生的高温区(IR测量)沿着LCE条与动圈一起传播,交变磁场B=152.8mT,f=46kHz。在水中启动时,如图3C所示。波与线圈同时移动,即使在冷水中也能实现高效加热。水对样品进行快速冷却也实现了快速运动。如图3D所示,热结构有限元分析仿真也很好地捕捉到了这种波浪运动。
这种波状运动可用于精确操纵水中的物体。如图3E所示,LCE-LM双层样条的局部致动引起的波运动准确地将圆柱体从一个目标位置推到另一个目标位置。最后还通过较短的双层带的循环驱动在水中实现爬行运动。如图3F所示,爬行器的每个驱动循环中,热量都集中在左端,仅导致左侧部分弯曲并从地面抬起。未变形右侧的高摩擦力导致样品收缩和弯曲。然后将线圈向右移动,左侧部分的恢复运动推动整个身体向右平移。经过九个循环后,爬行器在不到一分钟的时间内移动了大约一半的身体长度。
作者通过设计具有不同LM层数的区域,演示了连续弹出控制。图4A显示了制造的LCE-LM圆盘,其中中间圆盘由DIW圆周对齐。为了显示连续致动,圆盘分为两个LM模式区域:内部圆形LM和外部分段环状LM。在相同的磁场下,内环LM设计用于产生比外环LM段更高的欧姆损耗。从图4B可以看出,内LM圈由20层LM(~200μm厚)组成,分段外环LM由6层LM(~60μm厚)组成,以便在两个不同的磁场振幅下对结构进行连续加热。LM夹在较薄的底部和较厚的顶部圆形LCE层之间。两个LCE层之间的厚度差使其在规定的方向上弯曲。如图4C所示,弹出式结构由螺旋线圈加热,f=60kHz。该结构放置在线圈上方的基板上。内圆LM和外环LM分别由绿色和紫色虚线突出显示,以及两个参考点,点A(红色)和B点(蓝色),用于测量结构在整个驱动过程中的变形。
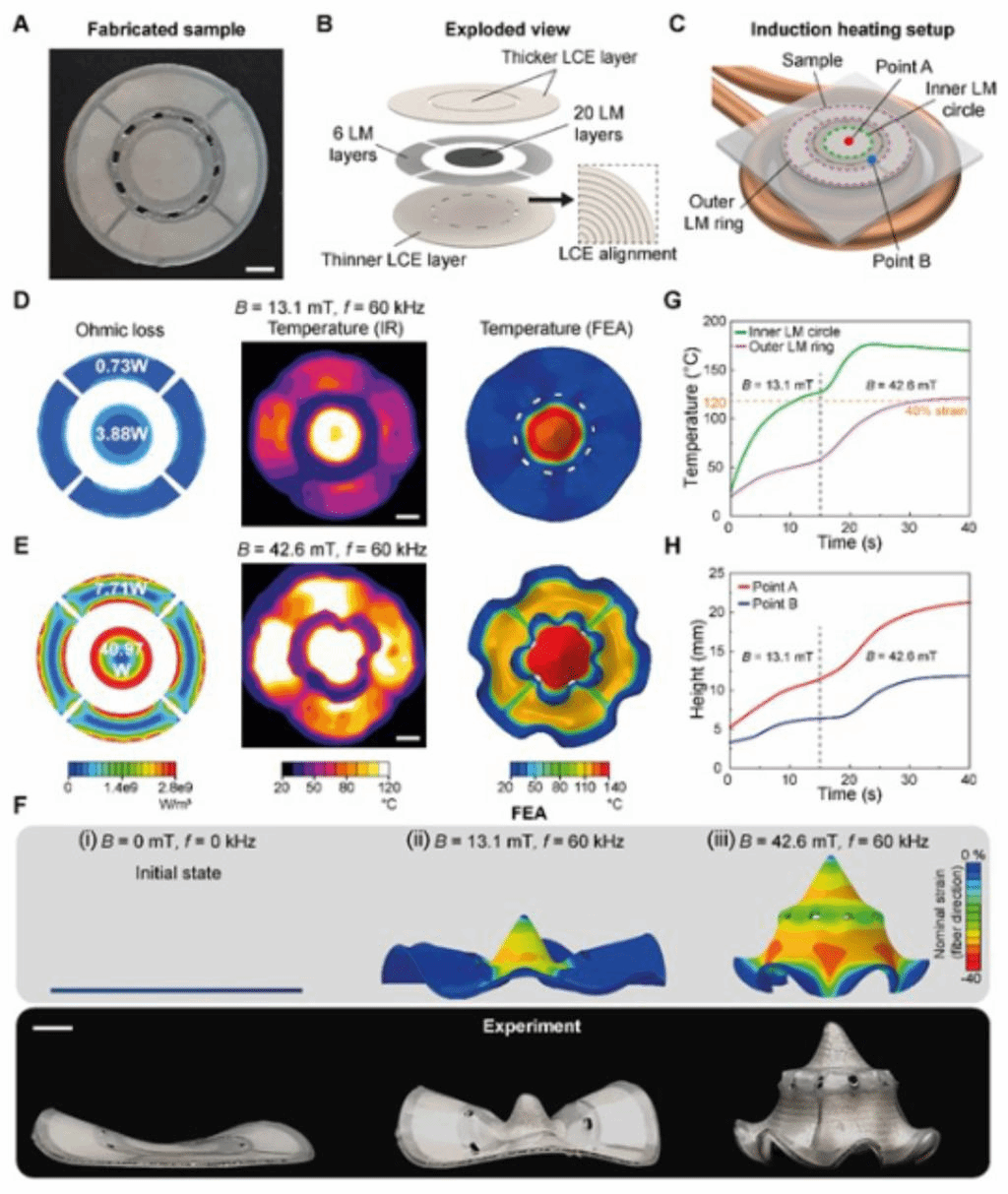
图4、弹出式LCE-LM结构及其连续驱动。(A)制造样品。比例尺:5mm。(B)样品的分解图,样品包含具有20层圆形LM的内部圆形LCE,以及具有6层分段LM环的外部LCE环。LCE层的介晶圆周状排列。(C)感应加热设置。将样品放置在螺旋线圈的基板上。样品上突出显示了两个参考点,A点和B点,以及内部圆形LM和外部环状LM的示意图。分别在(D)B=13.1mT和f=60kHz,以及(E)B=42.6mT和f=60kHz的条件下模拟欧姆损耗分布有限元分析,测量了其温度分布以及热结构有限元分析中的温度分布。比例尺:5mm。(F)在三个磁场振幅(i)B=0mT,(ii)B=13.1mT和(iii)B=42.6mT下的连续驱动(热结构有限元分析和实验)。比例尺:5mm。(G)内部圆形LM(绿色)和外部环状LM(紫色)的温度与时间的关系。垂直黑色虚线表示磁场从13.1mT增加到42.6mT的时间。水平橙色虚线代表120°C,产生40%的LCE应变。(H)A点(红色)和B点(蓝色)的高度与驱动过程中的时间的关系。垂直黑色虚线表示磁场从13.1mT增加到42.6mT的时间。
为了实现连续加热,磁场首先逐渐上升到B=13.1mT,f=60kHz,在此条件下,欧姆损耗分布诱导加热,仅驱动LCE结构的内圆LM区域。内圆LM中有限元分析预测的总欧姆损耗高于外环LM(图4D),分别为3.88W和0.73W。为了在不到2s的时间内将LCE加热到80°C以上(15%应变)以产生可见的变形,计算出临界欧姆损耗为1.3W。证明了只有内圆LM能够在80°C以上加热和驱动LCE层,而外环无法将LCE层加热到相同的程度。红外测量也证实了这一点。如图4E所示,在相同频率下磁场幅度增加到B=42.6mT时,内圆LM的总欧姆损耗增加到40.97W,外环LM的总欧姆损耗增加到7.71W,均高于临界欧姆损耗值2.2W,将LCE层加热到120°C(应变为40%),在不到2s的时间内发生较大的形状变化。温度通过红外测量确认。通过这种两步驱动,这种具有程序LM厚度分布的圆形LCE-LM复合材料获得了连续的弹出变形。为了预测顺序变形,作者采用在两个磁场振幅下观察到的样品中测量的温度,并将它们输入到热结构有限元分析中。图4D和图4E所示的模拟温度分布来自传热过程。模拟的顺序弹出行为与实际致动之间的比较如图4F所示,显示出极好的一致性。结构的初始状态、首次致动状态和最终致动状态如图4F(i)、(ii)和(iii)所示,分别对应于B=0、13.1和42.6mT。还值得注意的是,结构的略微不平坦的初始状态归因于样品制造过程中的残余应力。
为了表征不同结构区域的温度演变,在加热过程中通过红外成像记录内圆LM中心的温度和外环LM中心的平均温度,如图4G中的绿色和紫色曲线所示。结果表明,在B=13.1mT下,该结构仅在加热的前10s内圆LM区域内启动。在该区域达到的温度超过120°C,对应于LCE的40%应变(用橙色虚线表示),因此可以沿LCE纤维方向完全收缩,并且结构内部显著致动,如图4F(ii)中的侧视图所示。另一方面,外环LM温度稳定在50°C左右,不足以引发较大的LCE变形。然而,当磁场在15s时增加到B=42.6mT时,内圆LM和外环LM都超过120°C,允许整个结构完全驱动,如图4F(iii)中的侧视图所示。然后定量测量样品在不同位置的变形,并在图4H中显示,其中记录了结构弹出期间A点和B点的高度,分别由红色和蓝色曲线表示。对于B=13.1mT,与由点B表示的外环LM区域相比,由点A表示的内圆LM区域以更高的速率升高。然而,当B增加到42.6mT时,A和B的高度都会显著增加。因此可通过厚度分布设计LM加热效率。
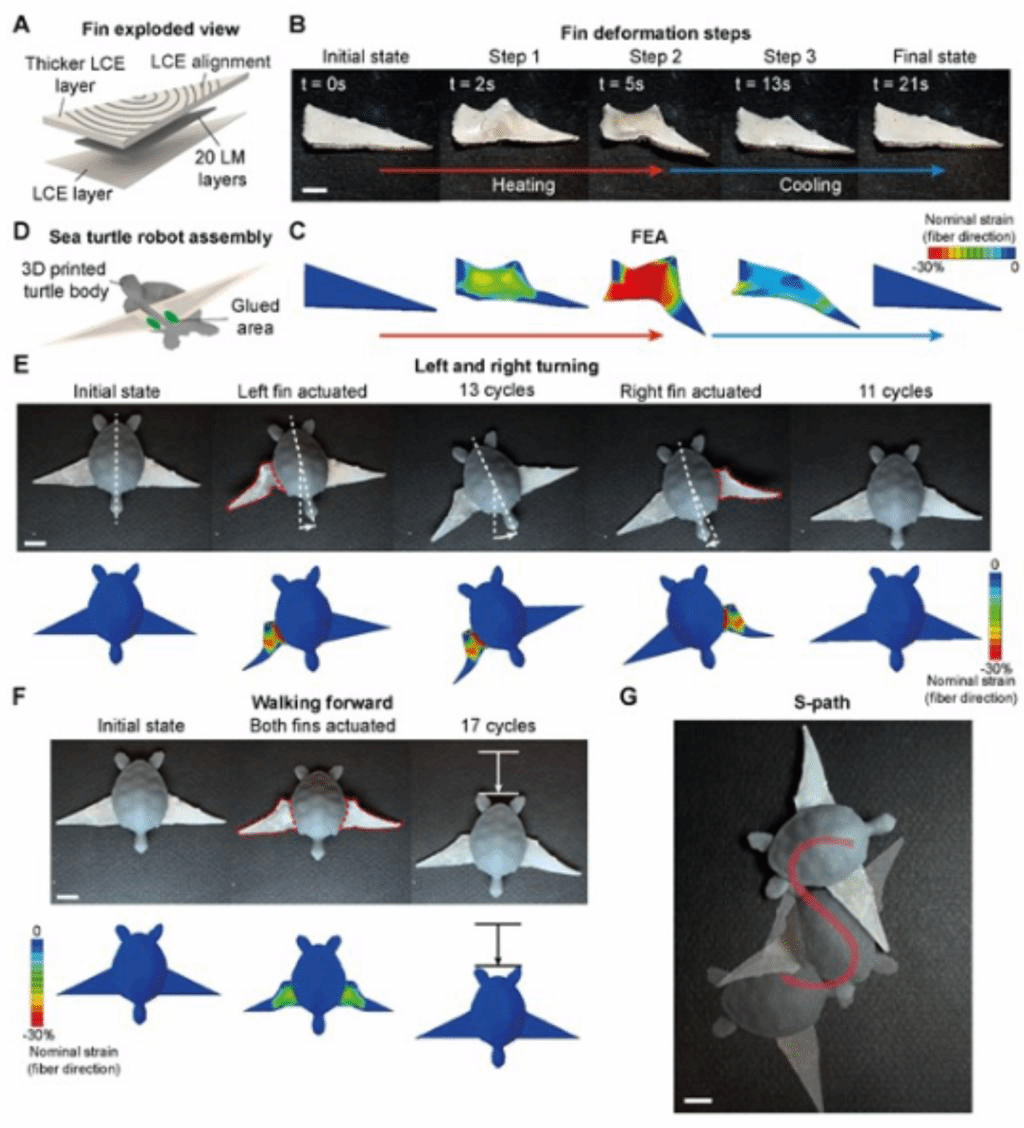
图5、LCE-LM机器人海龟的驱动和全向运动。(A)LCE-LM鳍的分解图,由夹在一个较厚和一个较薄的LCE层以及之间的20层LM组成。LCE介晶圆形排列。(B)鳍驱动过程。比例尺:5mm。(C)热结构有限元分析预测的鳍变形。(D)海龟组装示意图。鳍的绿色区域粘在龟体上。(E)海龟转弯运动实验(上)和热结构有限元分析预测(下),(F)步行运动实验(上)和热结构有限元分析(下),(G)海龟沿着“S”形路径的结合行走和转弯的运动。磁场B=107.4mT,f=37kHz。比例尺:7mm。
作者设计了一个能够控制全向爬行的软机器人,通过驱动LCE-LM“鳍”来模仿海龟的运动。海龟机器人由两个柔软的LCE-LM鳍驱动的3D打印刚体组成。鳍包含了圆对齐的LCE片,以便在收缩期间围绕LCE圆形对齐的中心进行类似关节的旋转(图5A)。为了产生面外弯曲,鳍设计有较厚的顶部和较薄的底部LCE,用以产生不均匀的加热。20层LM(~200μm厚)夹在两个LCE板之间。驱动时,鳍会经历一系列变形,如图5B所示。感应加热后,LCE板以旋转的方式围绕圆形对齐的中心收缩,厚度差异导致鳍片弯曲,与旋转变形相结合发生推动运动。随着热量的增加,鳍达到第二个变形步骤,以最大收缩应变驱动。这导致鳍的旋转变形发生在几乎平行于基板的平面上。冷却时,鳍不遵循与加热时相同的变形步骤,如第三个变形步骤所示。鳍片不会弯曲,而只是围绕关节旋转到初始位置。由于它们在加热和冷却过程中的不对称变形,鳍能够产生平移运动来移动海龟。如图5C所示,热结构有限元分析很好地捕获了这些变形步骤。
为了演示海龟的运动,将两个三角形鳍粘在3D打印的刚性龟体上(图5D)。通过驱动一个鳍片来实现转动运动(图5E),而同时驱动两个鳍片导致向前运动(图5F)。作者通过反复驱动左鳍和右鳍来演示转动运动,局部磁场的振幅为B=107.4mT,频率f=37kHz。热结构有限元分析可以很好地预测这种转弯运动,其中鳍中的温度为140°C。海龟的向前运动是通过使用更大的线圈驱动两个鳍来实现的,该线圈提供覆盖两个鳍的空间磁场,B=107.4mT和f=37kHz。如图5F所示,能够沿直线行走,热结构有限元分析与实验之间具有良好的一致性。最后,如图5G所示,通过耦合转弯和直线行走运动实现“S”形爬行路径,展示了全向运动的能力。
综上所述,作者报道了一种LCE-LM复合材料,能够利用LM感应加热实现超快,无束缚和可编程的LCE驱动。通过移动磁场并改变LM厚度和场强,涡流被局部调谐,允许对复合材料进行选择性和连续加热。结合DIW,可以轻松编程介晶对准方向,这种LM感应加热驱动策略能够进行复杂的LCE弹出变形,全向机器人运动以及水中物体操纵。
文字 丁聪
审核 叶曦翀
参考文献:DOI: 10.1002/adma.202302765
https://onlinelibrary.wiley.com/doi/10.1002/adma.202302765