Small | 基于液晶弹性体和螺旋金属线的仿生软硬混合智能人工肌肉
今天与大家分享一篇发表在Small上的文章,标题是“基于液晶弹性体和螺旋金属线的仿生软硬混合智能人工肌肉”。本文的通讯作者为西安交通大学机械工程学院的田洪淼副教授。
人工肌肉包括可以模仿动物肌肉结构的智能柔性材料,以及可以通过电力来改变状态的致动器。人工肌肉驱动系统是机器人技术的核心部件,在仿生机器人、机器人假肢和外骨骼等方面显示出巨大的应用潜力。通常有刚性和软性人工肌肉。传统的刚性肌肉有电缆型和连杆型。然而,刚性肌肉由于具有僵硬和笨重的结构导致环境灵活性差,自由度有限,控制复杂。因此,出现了形状变形灵活、机动性强、环境适应性强、制造成本低的柔软人工肌肉。但存在承载能力差、易受冲击、难以精确控制等不足。此外,刚性和软性肌肉通常都缺乏感应反馈,这限制了机器人的工作效率和可靠性。额外的传感元件增加了整个系统的复杂性,牺牲了各自的功能或响应能力。因此,人工肌肉无法充分满足实际的工程要求。
人的手臂包括肌肉、骨骼和感觉神经,结合了大形变、高承载力和变形传感器的功能,便于操作和运动。因此,人体手臂的驱动具有运动范围大和高灵活性的特点。骨骼具有支持功能,因为它们增强了承重能力并减少了肌肉在放松状态下消耗的能量。此外,在神经的反馈下,肌肉的运动更加准确可控。肌肉(驱动)、骨骼(承重)和感觉神经(传感)集成,赋予系统较好的适应性、灵活性和多功能性。因此,肌肉-骨骼-神经系统使人类手臂能够有效地进行复杂的生理活动,这为开发高性能人工肌肉提供了思路。
受这一想法的启发,作者提出了一种基于液晶弹性体(LCE)和螺旋金属线的软硬混合智能人工肌肉(SRH-SAM)。作者将螺旋金属线嵌入在可实现显著宏观收缩变形的LCE纤维中。外部LCE的热致响应性用于可逆大形变,内部螺旋金属丝用于实现高承载能力和电加热功能,二者分别对应肌肉和骨骼的功能。此外,螺旋金属线的电阻随着LCE的变形而变化,可监测人工肌肉的形变,起到感觉神经的功能,从而组成肌肉-骨骼-神经系统。作者还基于SRH-SAM提出了可重构闪亮光栅平面和仿生粘附/分离变换的设计。
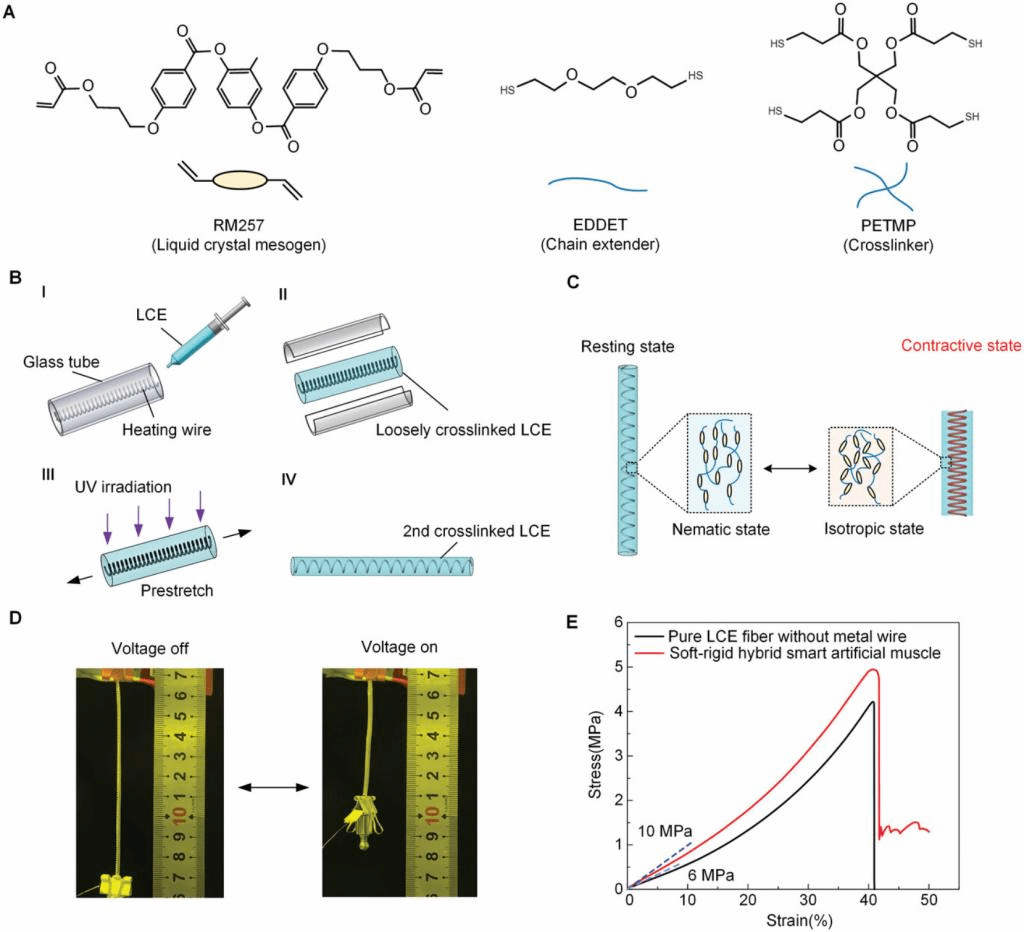
图1、SRH-SAM的化学组成、制造方法和工作原理。A)RM257是单体,EDDET是扩链剂,PETMP是交联剂。B)SRH-SAM的制造步骤:I)将LCE单体混合物注入中间有螺旋金属线的玻璃管中;II)凝胶化制备松散交联的LCE纤维;III)松散交联的LCE在预拉伸状态下接受紫外线照射;IV)获得SRH-SAM。C)SRH-SAM致动原理。通过对金属线施加电压实现变形。D)电压关闭和打开状态下SRH-SAM变形的图像。当施加40V的电压100s时,SRH-SAM长度减少了20%(初始长度为30mm)。E)SRH-SAM和不含金属线的纯LCE纤维的应力-应变曲线。当应变为≈40%时,两个样品均失效。
LCE的化学结构如图1A所示。根据差示扫描量热法(DSC)测试,LCE的玻璃化转变温度(Tg)(-6°C)低于室温(≈26°C)。图1B说明了SRH-SAM的主要制造步骤。按照步骤(I),将LCE单体混合物注入玻璃管中,中间为螺旋金属丝,凝胶化后,制备松散交联的LCE纤维(步骤(II))。在步骤(III)中,对纤维施加300%的预拉伸,使分子沿纤维的轴方向取向。随后,将纤维在紫外线照射下(10mWcm−2)保持10分钟以形成交联LCE。
图1C显示了通过控制SRH-SAM实现的可逆变形。当对金属丝施加电压时,由于金属丝的电热反应产生焦耳热,温度升高,加热的LCE从向列相转变为各向同性相,从而在轴向上收缩。图1D显示了致动器的照片。当施加20V的电压时,人工肌肉产生40%的应变。向列到各向同性转变温度(TNI)为76.31°C。
为了比较不含金属线的纯LCE纤维和SRH-SAM的刚性和承载能力,研究了它们的应力-应变关系和杨氏模量(图1E)。结果表明,不含金属丝的纯LCE纤维的杨氏模量为6MPa,嵌入金属丝后提高到10MPa。当应变在40%左右时,纯LCE纤维和SRH-SAM的外层断裂,没有金属线的纯LCE纤维的应力瞬间消失。同时,由于内部金属线的强度高于外部LCE层,SRH-SAM的强度立即下降并在一定值附近波动了一段时间。因此,嵌入金属丝可以增加SRH-SAM的杨氏模量。
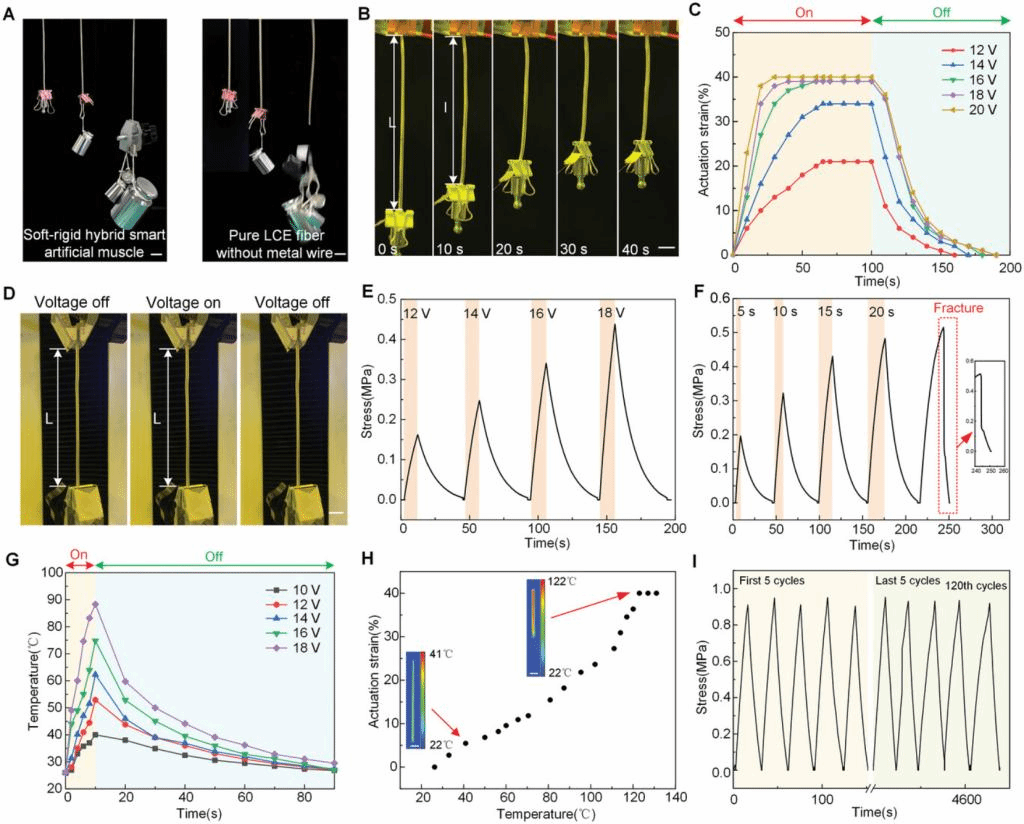
图2、SRH-SAM电热和机械性能表征。A)SRH-SAM与不含金属线的纯LCE纤维的承载能力比较。B)人工肌肉在6V电压下提升3.20g物体的图像,收缩应变为40%。C)在12至20V的不同施加电压下,人工肌肉的驱动应变随时间的关系图。加热100s后,关闭电压,人工肌肉恢复到其初始长度。D)人工肌肉测试过程的驱动应变图像。人工肌肉样品的两端垂直固定在夹具上,测试过程中长度保持不变。E)施加电压对驱动应力的影响。施加的电压范围为12至18V,加热时间为10s。F)加热时间对驱动应力的影响。在5V电压下,加热时间为5至20s。在18V电压下得到SRH-SAM人工肌肉温度与时间曲线。加热10s后,关闭电压,将人工肌肉冷却至室温。H)在20V电压下驱动应变与人工肌肉温度的关系图。插图显示了5%和40%驱动应变下的温度分布。I)人工肌肉的循环驱动应力测试,持续时间为4639s。在每个测试周期中,将样品加热10s,然后关闭电压。在人工肌肉冷却到室温后,开始新的测试周期。(A)、(B)、(D)和(H)中的比例尺为10mm。
将SRH-SAM的承载能力与不含金属线的纯LCE纤维的承载能力进行了比较(图2A),两种纤维具有相同的初始长度。当在纤维的底端悬挂50g的重物时,两根纤维都能稳定地承受负载而不会断裂,纯LCE纤维的长度大于SRH-SAM的长度。当悬挂700g砝码时,SRH-SAM稳定地维持,而没有金属线的纯LCE纤维迅速断裂。这进一步表明,由金属线和LCE组成的并联系统增强了SRH-SAM的承载能力,提高了其安全性。
当施加20V的电压时,SRH-SAM收缩,其长度在30s内减少了其初始长度(100mm)的40%,即负载被提升了40mm(图2B)。通过恒定载荷乘以重量的提升高度(6.3g)来计算SRH-SAM完成的机械功。然后将机械功除以SRH-SAM体积来获得功密度。发现SRH-SAM的工作密度约为109.76kJm−3(在20V下30s内),明显高于哺乳动物骨骼肌(约8kJm−3)。此外,SRH-SAM的功率密度约为3.66kWm−3。
随后,通过施加不同的电压(12、14、16、18和20V)持续100s来定量表征SRH-SAM的致动行为(图2C)。致动应变定义为ε=(L−l)/L×100%,其中L和l分别表示初始状态和致动状态下SRH-SAM的长度。在每次施加的电压下,人工肌肉的驱动应变首先增加。当温度稳定,或人工肌肉的驱动应变达到最大值(40%)时状态稳定。当电压关闭时,人工肌肉的驱动应变在100s内降低。当电压从10V增加到18V时,最大驱动应变从21%变为40%。当电压从18V进一步增加到20V时,最大致动应变保持相同值(40%),但响应时间显著改善,约40s后达到最大收缩(30%)。此外,在20V电压下,致动应变在30s内达到最大值40%,并在电压关闭后100s内恢复到初始长度。驱动时间和恢复时间之间的这种差异可归因于LCE的低导热性。
接下来研究了固定长度人工肌肉的驱动应力(图2D)。首先,通过施加不同的电压(12、14、16和18V)10s来测量人工肌肉的驱动应力。对于给定电压,致动应力在10s内从零增加到最大值,并且在电压关闭后,致动应力降至零(图2E)。当电压从12V增加到18V时,最大驱动应力从0.16MPa增加到0.44MPa。增加外加电压,人工肌肉的驱动应力得到改善,最大驱动应力高于哺乳动物骨骼肌(~0.35MPa)。此外,还研究了相同电压(18V)下致动应力与加热时间的关系,加热时间从5s增加到20s。根据图2F中的结果,加热时间越长,致动应力越高。由于高电压引起的高加热速率实现了人工肌肉的快速驱动。较长的加热时间允许人工肌肉吸收更多的热量,更多的LCE介晶变得无序,导致高驱动应力。可以得出结论,提高电压或延长加热时间都是增强驱动应力的可行方法。进一步增加加热时间,人工肌肉的外部LCE层将断裂,表明驱动应力超过了外部LCE的强度(图2F)。在失效的瞬间,驱动应力从0.52MPa突然降低到0.14MPa,然后降低到零,并具有一定的斜率;这再次表明内部金属线起到SRH-SAM安全保护的作用。此外,纯LCE纤维可达到的最大驱动应力为0.60MPa,与SRH-SAM相当,表明金属丝对LCE的致动应力影响较小。
还测试了SRH-SAM提升物体的能力。在20V(4.84W)的电压下,SRH-SAM可以举起10、20和25g的重量。举起25g的重量时应变为33%。在不同电压(10,12,14,16和18V)下测量人工肌肉的温度,均持续10s(图2G)。对于给定的电压,温度在10s内迅速升高。当电压关闭时,温度在超过26s后降至室温(约80°C)。这种漫长的冷却过程归因于LCE的低导热性,这也解释了为什么人工肌肉需要比收缩更多的时间来从最大驱动应变中恢复(图2C)。当电压从10V增加到18V时,最高温度从40°C增加到88°C,说明温度升高速率会影响驱动应变(图2C)。
接下来研究了在20V电压下驱动应变与人工肌肉温度之间的关系(图2H)。驱动应变随着温度的升高而增加,直到达到最大应变。接下来,即使温度继续升高,致动应变也保持不变。当驱动应变为5%和40%时,得到人工肌肉的温度曲线。结果发现,人工肌肉在不同温度下达到不同的驱动应变,且人工肌肉内温度分布均匀。
还获得了人工肌肉在不同电压(12、14、16和18V)下达到最大驱动应变时的温度曲线。最高温度位于人工肌肉的中心,即金属线嵌入的位置。由于人工肌肉直径仅为1.5mm,因此可以近似地认为温度均匀分布。此外,没有金属线的纯LCE纤维与人工肌肉之间的驱动应变间可以观察到微小的差异,表明嵌入的金属线不会影响LCE的驱动性能。
观察了人工肌肉可逆驱动应力的稳定性和鲁棒性,结果如图2I所示。对SRH-SAM施加16V的电压。在每个测试周期中,加热10s后关闭电压。在温度达到室温后,开始新的周期,进行了120个测试循环,总测试时间为4639s。通过比较前五个循环和后五个循环的结果,可以观察到最大应力值保持了其初始水平,说明了人工肌肉的稳定驱动特性。
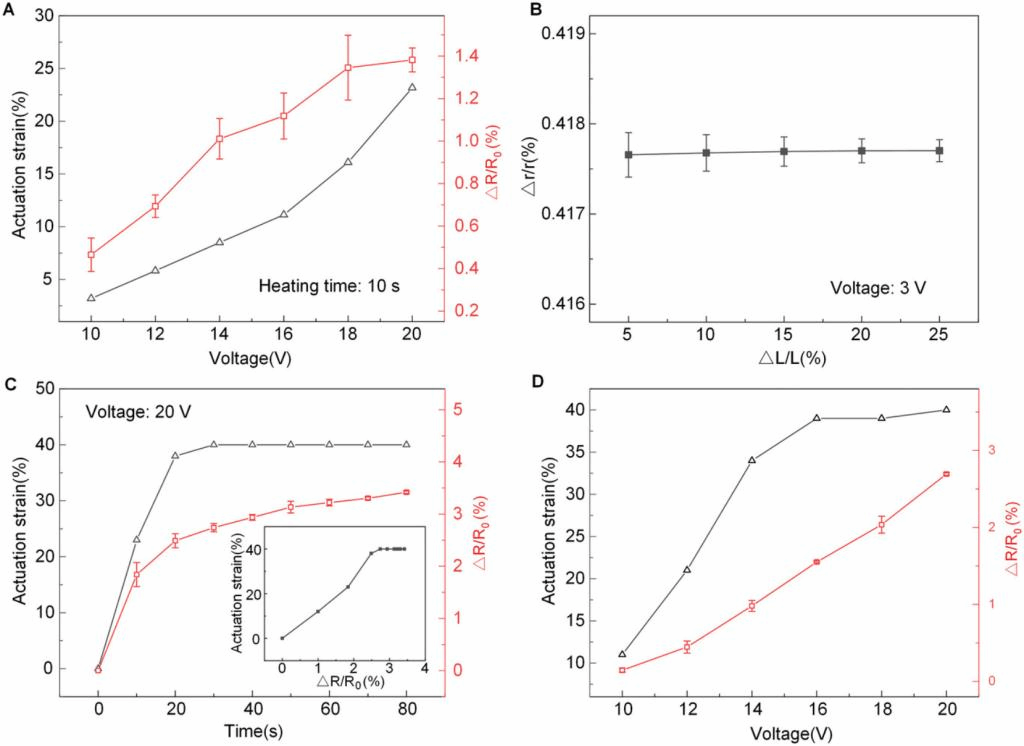
图3、SRH-SAM感应功能。A)在不同电压(从10到20V)下,10s的加热期间嵌入金属线的LCE驱动应变与电阻的关系(ΔR/R0)。B)在3V电压下,未嵌入LCE中的金属线的形变(ΔL/L)对电阻(Δr/r)的影响。金属丝被拉伸至5%到25%之间。C)在20s的80V电压下,驱动应变和电阻(ΔR/R0)与时间的关系;插图显示了启动期间驱动应变和电阻之间的关系(ΔR/R0)。D)在不同电压(从10到20V)下最大致动应变和电阻的关系(ΔR/R0)。当人工肌肉达到致动应变上限,记录驱动应变和阻力值。
人工肌肉的变形程度直接决定了器件的驱动效果。传感信号可用于监测人工肌肉的预期变形,根据结果调整外部刺激,从而实现人工肌肉和基于人工肌肉的装置的闭环控制。在SRH-SAM的驱动过程中,金属线的电阻随温度和应变的变化而变化,金属丝的电阻变化可用于间接监测人工肌肉的变形。
从理论上讲,嵌入人工肌肉中的金属线的电阻可以表示为
 (1)
(1)
其中ρ是电阻率,L是长度,A是横截面积。由于在驱动过程中L=L0和A=A0,然后
 (2)
(2)
其中ΔR=R−R0。温度对电阻率的贡献由ρ=ρ0[1+α(T−T0)]给出,其中α是电阻的温度系数,估计为5×10−6°C−1。
因此,金属线电阻相对于温度变化的相对变化可以由下式给出
 (3)
(3)
根据公式(3),温度的升高会导致电阻的变化。研究发现,电压和加热时间都会影响温度,导致金属线电阻增加。通过施加不同电压(10、12、14、16、18和20V)10s来定量表征金属线电阻,研究了电阻与致动应变的相对变化之间的关系。如图3A所示,在10V电压下,驱动应变达到0.46%时,电阻的相对变化为1.38%;在20V电压下,当驱动应变达到1.27%时,电阻的相对变化为23.2%。这表明,电阻的相对变化随着驱动应变的增加而增加,进而可实现人工肌肉的传感功能。同时评估了未嵌入LCE中的金属线的电阻与变形之间的关系,以排除变形对电阻的影响。在此过程中,金属线在3V的施加电压下从其初始长度拉伸5%至25%。图3B显示,电阻的相对变化保持在0.42%左右,几乎不随变形而变化。因此,导致金属线电阻变化的主要因素是温度,这已经通过理论推导来解释(公式(3))。
在20V的电压下,致动的前20s内,人工肌肉的致动应变和金属丝电阻的相对变化迅速增加。t=30s时,人工肌肉达到最大驱动应变(40%),而嵌入LCE中的金属线电阻的相对变化从0增加到2.69%(图3C),致动应变保持不变,金属线电阻的相对变化保持缓慢增加。因此,在人工肌肉达到致动饱和度之前,金属线电阻的相对变化可以反映致动应变。可以根据金属线电阻的相对变化实时监测人工肌肉的变形行为。
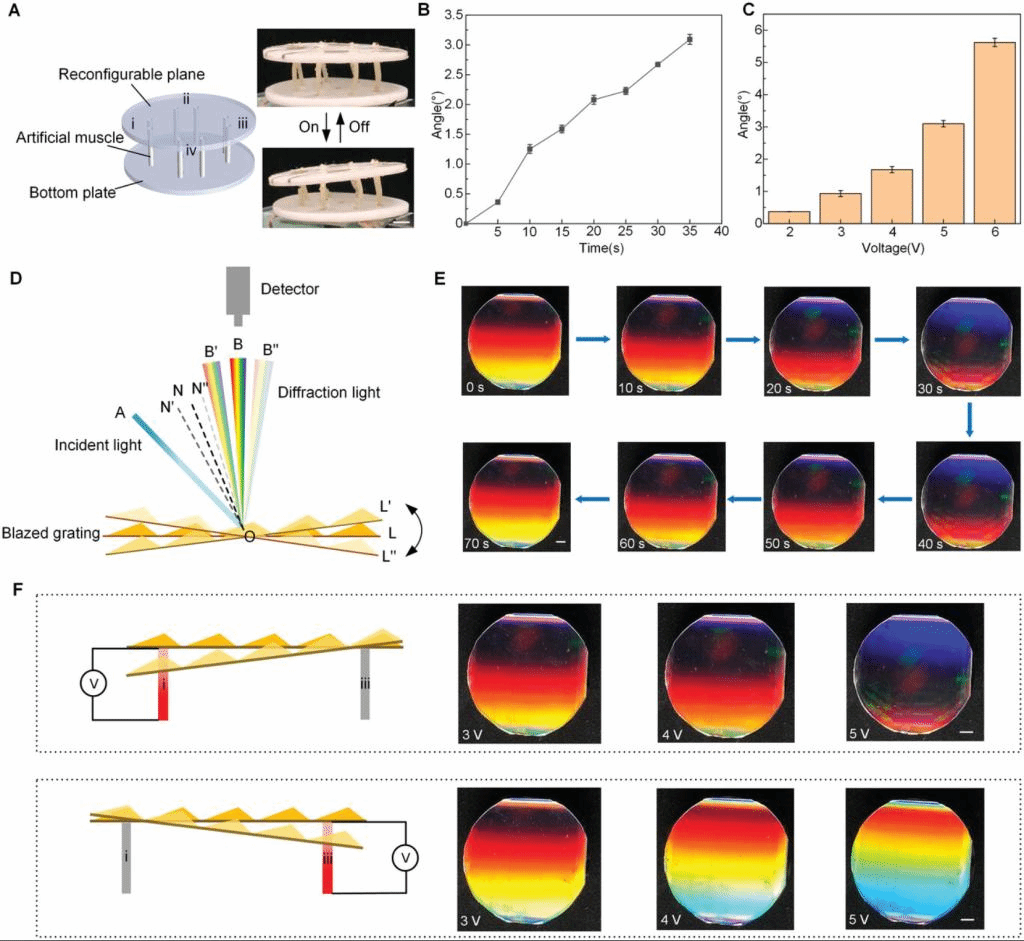
图4、配备SRH-SAM的可重新配置的闪亮光栅平面。A)可重构闪亮光栅平面的设计、制造和工作原理。四组人工肌肉均匀分布在光栅平面下方,彼此独立。B)摆动角度随时间变化的关系。35s后获得最大摆角。C)电压对摆角的影响,与电压对人工肌肉致动应变的影响一致。D)光栅光谱原理示意图。入射灯的位置是固定的。当光栅平面摆动时,衍射光会相应变化。E)通过平面重建的衍射条纹的动态演化。红色衍射条纹在光栅平面上的来回运动反映了其重建特性。F)通过调整人工肌肉的位置和电压得到不同位置的衍射条纹。在不同的电压下,红色衍射条纹移动到光栅平面上的不同位置。(A)、(E)和(F)中的比例尺为10mm。
作者提出了一种可重构的闪亮光栅平面(图4A),展示了人工肌肉在制造可重构单元中的应用。将闪亮的光栅放置在可重新配置的平面上。由于光对可重构平面的角度和方向的变化非常敏感,因此由闪耀光栅产生的衍射条纹可以表明平面已被重新配置。当对一组人工肌肉(例如(i)组)施加电压时,人工肌肉收缩,导致平面沿同一方向摆动。一般来说,人工肌肉的驱动应变越高,平面的摆动角度就越大。当电压关闭时,平面返回到水平位置。
将光栅平面的摆动角作为时间和电压的函数。在5V电压下,角度从0°变为3.1°,35s后获得最大角度(图4B)。电压关闭后,人工肌肉逐渐恢复其初始长度,摆动角度回到水平位置,证明了平面的可重构性。当施加一组不同的电压(2、3、4、5和6V)时,图4C表明,施加的电压为2V时,平面仅摆动0.4°。当施加的电压为6V时,它将摆动5.6°。可以通过施加不同的电压来实现平面的摆动可控性。
在平面上放置了一块闪亮的光栅,展示了平面的重构性和可控性。从光栅平面正上方的探测器观察到衍射条纹的变化。衍射条纹的运动反映了摆动方向和角度。当对组(i)的人工肌肉施加5V的电压时,红色衍射条纹沿一个方向向边缘移动,直到30s后几乎消失(图4E)。当电压在t=30s关闭时,红色衍射条纹以相反的方向移回平面中心,平面恢复到初始位置。在这个过程中,红色衍射条纹在t=10s和t=60s时的位置几乎重合,红色衍射条纹在t=20s和t=50s的位置也几乎相同,这表明光栅平面在相应时间点的摆角是相同的。
随后,通过对组(i)和(iii)施加不同的电压来评估平面的可控性(图4F)。组(i)中,平面停止摆动并在3V电压下保持稳定后,红色衍射条纹从其初始位置略微移动。当施加4V电压时,红色衍射条纹进一步移动,红色条纹下方的黄色条纹几乎消失。当对组(i)施加5V的电压时,红色条纹向平面边缘移动并几乎消失。同样,当对组(iii)施加不同的电压(3,4和5V)时,光栅平面向相反方向偏转,并且红色衍射条纹沿该方向移动到不同的位置。因此,可以在不同位置对人工肌肉施加合适的电压,使平面在指定的方向和一定角度上摆动和重新配置。
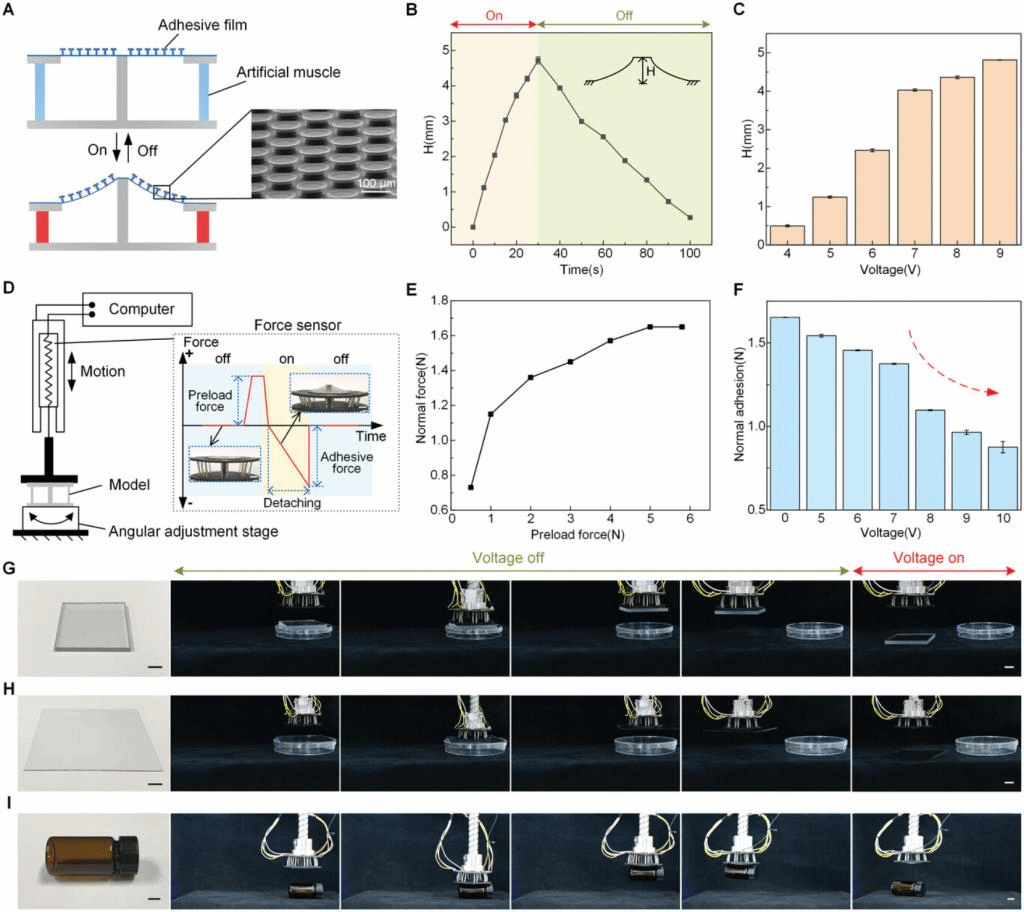
图5、基于人工肌肉和粘合膜的软抓手。A)由SRH-SAM和粘合膜组成的软夹持器。粘附膜为蘑菇形阵列结构。B)H作为时间函数的动态变化。H定义为薄膜边缘的下落高度。C)电压对H的影响,随着电压的增加而增加,最终趋于饱和。D)用于测量正常附着力的定制设备的示意图。该设备包括一台计算机、一个力传感器以及一个运动和角度调整台。E)预紧力对正常附着力的影响。法向附着力随预紧力增大而增大,并逐渐趋于饱和。F)正常附着力作为施加电压的函数。测量粘附膜在不同电压下完成重建时的正常附着力。G-I)分别是亚克力板、载玻片和样品瓶的附着/分离过程的图像。这些物体的形状和重量是不同的。(D)、(G)、(H)和(I)的比例尺为10mm。
设计并制造了基于人工肌肉和粘合膜的软抓手(图5A)。软夹持器由粘合层和人工肌肉调节层组成。粘合剂层(400μm厚)是蘑菇形的粘附膜。人工肌肉在初始状态下放松。因此,粘合膜是平坦的并具有高附着力。当胶膜接触相对表面时,由粘合结构和相对表面的范德华力和毛细管力共同完成拾取功能。在释放过程中,人工肌肉在施加的电压下收缩,薄膜的边缘被人工肌肉拉下,导致薄膜从其初始平面状变形为金字塔状,这进一步减小了粘合膜与相对表面之间的接触面积。因此,可以通过控制人工肌肉的松弛和收缩来完成粘附膜的高附着力和低附着力之间的变化。
将胶膜的下降边缘高度定义为H,定量测定了H随加热时间和电压的变化。图5B显示,在9V电压下,下降高度H在25s内增加到最大值4.72mm。此时,人工肌肉的驱动应变约为25%。电压关闭后,下降高度H在75s内恢复。根据图5C,当施加的电压从4V增加到9V时,下降高度H从0.50增加到4.81mm。由于温度的电压可控性,下落高度与外部电压成正比,证实了施加的电压可以有效地调节胶膜的变形行为。
使用定制的设备评估直接决定连接/分离功能性能的正常附着力(图5D)。图5D显示,胶膜在零电压下是平坦的。然后,通过移动测试表面(玻璃板)对粘合膜施加预载荷,直到测试表面和粘附膜之间实现保形接触。随后,施加电压以诱导粘合膜的变形。首先研究了在没有施加电压的情况下预紧力对粘附力的影响(图5E)。在0.5N的预紧力下,相应的粘附力为0.73N。当预紧力增加到4、5和5.8N时,粘附力分别变为1.52、1.65和1.65N。可以推断,当预紧力较低时,粘附力随预紧力的增加而增加,但其增加速率逐渐降低,直到达到饱和点。图5F显示,当不施加电压时,胶膜的正常附着力为1.65N,粘合膜处于高粘附状态。当电压增加到10V时,粘合膜的正常附着力降低到0.88N并逐渐趋于饱和。此时,胶膜处于低粘附状态。测试了不同形状和材料的物体,结果如图5G–I所示。使用0V的附着电压和9V的分离电压,将亚克力板(重量:60g;尺寸:60mm×60mm×5mm)成功地从一个位置运输到另一个位置(图5G)。载玻片(重量:24g;尺寸:10mm×10mm×1mm)(图5H)和样品瓶(重量:19g;长度:58mm;直径:25mm)也被成功运输(图5I)。
综上所述,作者提出了一种基于LCE和螺旋金属线的SRH-SAM,集大变形、高承载力和变形传感监测功能于一身。在致动过程中,螺旋金属线的电阻随着LCE的电热变形而变化,从而实现变形传感特性。人工肌肉的工作密度约为109.76kJm−3(在20V下30s后),可以达到40%的最大收缩应变。随后,基于人工肌肉建造了可重构的闪亮光栅平面。通过在不同位置对人工肌肉施加合适的电压,平面可以沿指定方向和角度摆动。最后,构建了一种基于人工肌肉的软抓手。软夹持器可以通过开/关电压调节粘附膜与相对表面的接触状态来获得可切换的粘附力。
文字 丁聪
审核 叶曦翀
参考文献:DOI: 10.1002/smll.202206342
https://onlinelibrary.wiley.com/doi/10.1002/smll.202206342