ACS Nano | 具有极佳循环稳定性,无预张力并可自行恢复的卷曲人工肌肉纤维
今天与大家分享一篇发表在ACS Nano上的文章,标题是“具有极佳循环稳定性,无预张力并可自行恢复的卷曲人工肌肉纤维”。本文的通讯作者为中国科学院苏州纳米技术与纳米仿生研究所的邸江涛研究员。
人工肌肉纤维在受到热、离子作用、溶剂渗透等刺激时会产生大行程收缩和高能量输出。作为自适应致动器,其在智能结构和软机器人中的应用潜力相当可观。液晶弹性体(LCE)纤维可从向列相过渡到各向同性相,并快速产生超过30%的收缩行程。由于刺激诱导的纤维解缠使相邻的纤维更紧密地结合,卷曲的人工肌肉纤维表现出优异的驱动性能。缠绕的人工肌肉纤维可产生强大的收缩,但经常需要扭转拉伸以从收缩状态恢复到初始长度。聚合物纤维在玻璃化转变温度以上时可以暂时稳定,但循环驱动会导致卷绕的纤维松弛。此外,在收缩之前,需要预张力以分离缠绕的纤维并提供收缩空间,这限制了实际应用。
为了克服上述挑战,作者将线圈致动“放大器”结构与LCE相结合,以生产无需应力恢复,无预张力和具有出色致动性能的人造肌肉纤维。作者用LCE涂覆CNT光纤,部分渗透到光纤中。经过卷曲和随后的训练,LCE/CNT复合纤维形成了扭转稳定的结构,线圈排布井然有序,可以直接收缩。LCE的相转变促进了CNT的结构转变,从而实现了快速而有效的驱动。作者还观察到弹性CNT纤维可以充当恢复的弹簧。这种可自恢复的功能使其可用于可逆的物体移动、多向弯曲和快速打击。
LCE/CNT纤维的制备和表征
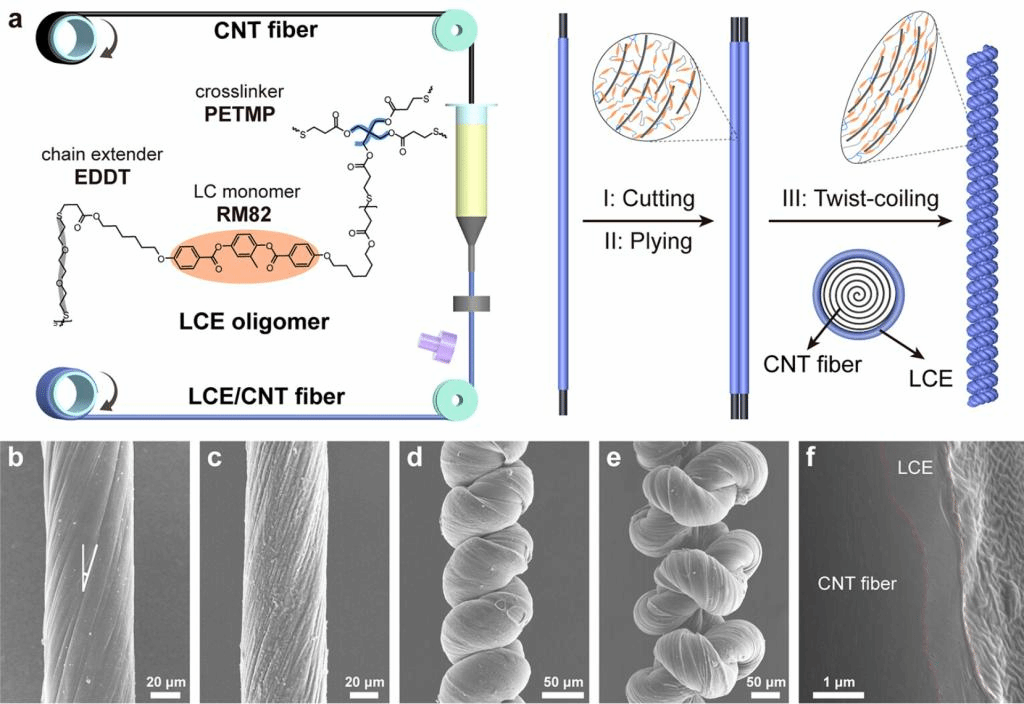
图1、卷曲液晶弹性体/碳纳米管(LCE/CNT)复合纤维的制备与表征。(a)通过形成LCE涂层、多纤维和扭转连续制备LCE/CNT复合纤维的示意图。扭转的(b)碳纳米管和(c)LCE/碳纳米管复合纤维的SEM图像。训练后(d)1层和(e)2层双绞的LCE/CNT复合纤维的SEM图像。(f)扭曲LCE/CNT复合纤维边缘的横截面SEM图像,显示CNT纤维芯周围被薄LCE涂层紧密包裹。
图1a展示了扭曲LCE/CNT纤维的制备过程。首先,通过化学气相沉积法制备的CNT纤维通过含有LCE低聚物的注射器,确保涂层的均匀性之后,通过连接的0.25mm孔。LCE低聚物通过1,4-双-[4-(6-丙烯酰氧基己氧基)苯甲酰氧基]-2-甲基苯(RM82)、2,2′-(乙二氧基)二硫乙基醇(EDDT)和季戊四醇四(3-巯基丙酸酯)(PETMP)之间的硫醇-迈克尔加成反应合成(图1a)。随后,使用紫外线(UV)照射来交联LCE低聚物,使CNT纤维被LCE层包覆。使用这种方法连续收集了长达数十米的复合纤维。最后将制备的LCE/CNT纤维紧密缠绕(图1a,右图)。图1b显示了直径为60μm,偏置角为17°的CNT纤维的扫描电子显微镜(SEM)图像。尽管纤维表面的碳纳米管看起来排列良好,但纤维内部的纳米管取向不能像表面的取向那样好。碳纳米管纤维的密度为0.47 g cm–3,大大低于其理论密度。这表明纤维内结构松散,允许LCE低聚物渗入纤维中。图1c显示了使用上述程序制备的扭曲LCE/CNT复合纤维,碳纳米管纤维的表面结构得到了很好的保留。此外,图1f所示的双绞复合纤维的横截面SEM图像表明,LCE在纤维上的涂层是保形的,涂层的厚度约为1μm。这表明,LCE低聚物被渗透到CNT纤维中,导致LCE低聚物通过紫外线照射交联后在纤维内部及其表面形成LCE。
由于向列相和各向同性相之间的可逆切换调节了基于LCE的人工肌肉纤维的驱动,液晶元的排列至关重要。作者通过缠绕LCE/CNT复合纤维来对齐LC液晶元。由于CNT和LCE之间良好的界面接触(图1f),施加的扭曲导致LCE涂层拉伸并取向。
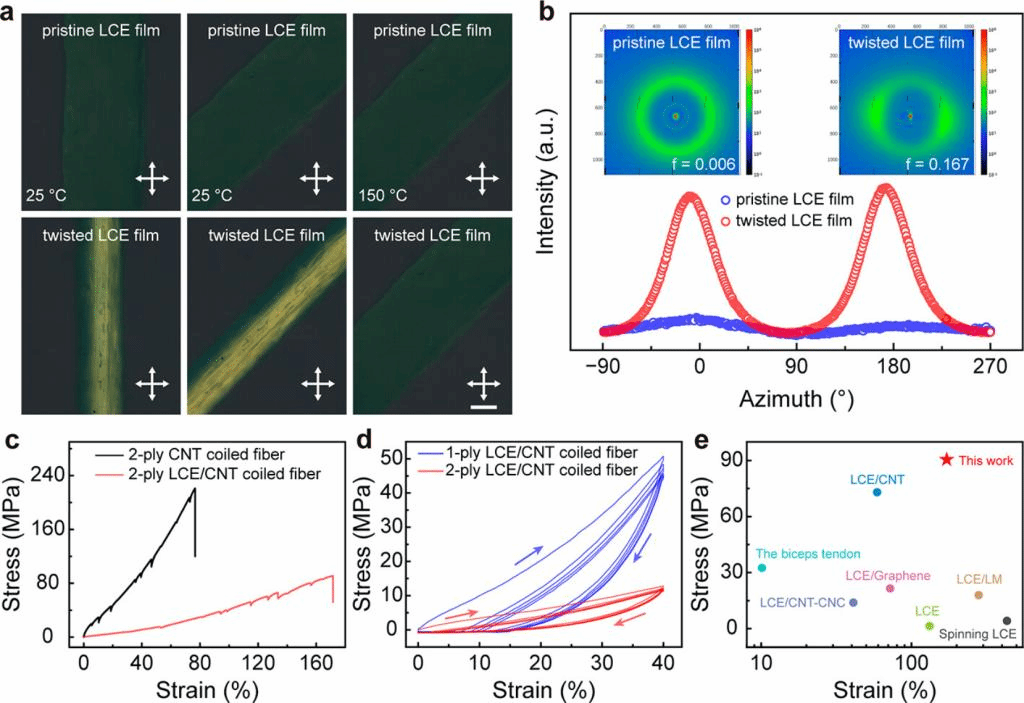
图2、扭曲LCE/CNT复合纤维的结构表征。(a)25和150°C下原始LCE薄膜(顶部)和扭曲LCE薄膜(下)的POM图像。比例尺:100μm。(b)原始和扭曲LCE薄膜的方位扫描强度。插图对应WAXS图案。(c)对制备的碳纳米管和LCE/碳纳米管卷绕纤维进行单轴拉伸(25°C)。(d)卷曲LCE/CNT复合纤维的循环拉伸曲线。(e)LCE致动器的应力与应变的阿什比图。
如前所述,螺旋取向结构使得使用POM和WAXS表征卷绕LCE/CNT复合纤维中的LCE取向变得极其困难。作为替代方案,作者表征了双绞LCE/CNT纤维剥离的LCE薄膜的排列。图2a表明,通过调整LCE薄膜相对于偏振片的轴向角度,在薄膜中观察到从暗到亮的过渡。在150°C时,LCE薄膜的光场消失,在外加热下,发生轴向收缩和径向膨胀。WAXS进一步证实了这一结果(图2b)。衍射图表明原始LCE薄膜是非取向的。由于通过扭曲使LC液晶元对齐,产生了弧形图案,Herman取向参数从0.006增加到0.167。这些结果验证了卷曲LCE/CNT复合纤维中LC液晶元的扭曲诱导取向。
碳纳米管作为基体大大提高了LCE的抗拉强度,LCE/CNT复合纤维的拉伸强度远高于原始CNT纤维。LCE/CNT复合纤维的拉伸强度从433MPa提高到928MPa。引入双绞后,LCE/CNT复合纤维的拉伸强度降低到90.8MPa,而断裂伸长率增加到171.5%(图5c)。在图2e所示的阿什比图中,作者比较了文献中报道的基于LCE的纤维致动器和二头肌纤维的应变和应力。双绞LCE/CNT复合纤维优异的力学性能有利于实现较大的功率密度。然而,循环机械拉伸会导致纤维的塑性变形(图2d)。这可能是由于纤维中碳纳米管的取向相对较差,以及碳纳米管的重新排列。
LCE/CNT纤维的自恢复和无预张力驱动
由于具有稳定的焦耳热性能,作者对双绞LCE/CNT复合纤维进行了电热驱动。与之前报道的在相同负载下收缩和恢复的卷绕人工肌肉纤维不同,作者的双绞LCE/CNT复合纤维表现出可自恢复致动的显著特征。因此,在讨论致动性能之前,作者在图3a(i,ii,→,iii,→i)中进行了示意性的说明。当电热驱动时,双绞LCE/CNT纤维收缩并提升负载。关闭电源后,纤维可以在没有负载帮助的情况下恢复到原来的长度,因此,自恢复致动使其能够在整个致动周期内产生有用的功。而正常致动由于使用相同的负载,在整个致动循环中净功为零。
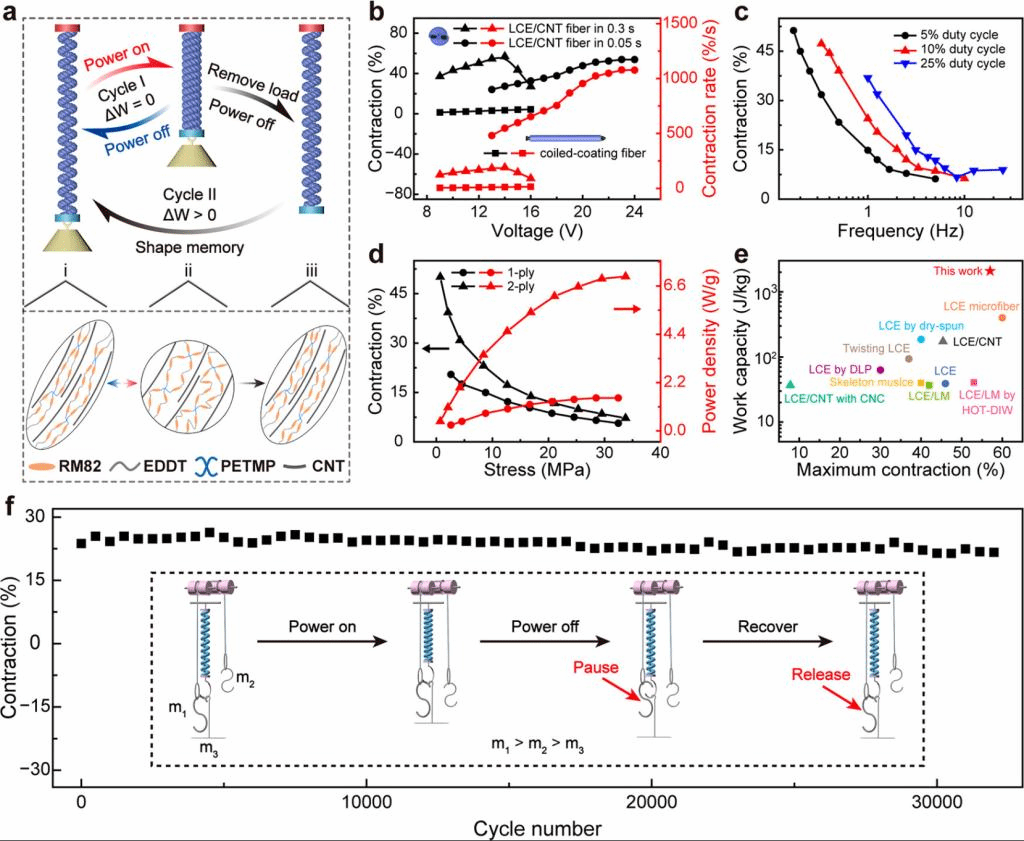
图3、双绞LCE/CNT复合纤维电热致动表征。(a)双绞LCE/CNT复合纤维的驱动方式和驱动机构。在周期I(i→ii→i)中,收缩纤维的恢复需要负载的存在,而在循环II中,收缩的纤维能够在没有负载的情况下恢复(i→ii→iii→i)。纤维的顶端是固定的,底端可以自由收缩/恢复,但不能旋转。(b)不同电压下扭曲LCE/CNT复合纤维和双绞LCE/CNT复合纤维的收缩应变(左轴)和收缩速率(右轴)。通过将LCE涂覆在扭曲CNT纤维表面,然后制备双绞LCE/CNT纤维。(c)双绞LCE/CNT复合纤维收缩的频率依赖性。在不同的占空比下,电压保持在11V,施加的应力为0.82MPa。(d)1层和2层双绞LCE/CNT复合纤维收缩应变(左轴)和功率密度(右轴)的应力依赖性。电压保持在11V,0.03Hz时占空比为0.1。(e)基于LCE的纤维致动器和人体骨骼肌的工作能力与最大致动的阿什比图。(f)在0.1Hz、11V方波电压和0.02占空比下,双绞LCE/CNT复合纤维的自恢复致动循环性。插图为循环驱动测试设置;重量-1、重量-2和重量-3分别是2、1.24和0.66g。
由于纤维是由LCE浸润的CNT纤维纺制而成,取向性差,密度低,模量低,因此在双绞和卷绕过程中可能发生塑性变形。在负载下进行多次循环的致动训练进一步增加了缠绕距离。在训练双绞LCE/CNT复合纤维约90次循环后,相邻缠绕之间的平均距离从约132μm增加到178μm弹性系数从1.17降低到1.14。
作者深入研究了纤维的自恢复致动机理。首先研究了纤维中各个组分的驱动性能。LCE纤维的制备方法与制备LCE/CNT纤维的挤出交联程序相同。当纯LCE温度低于相变温度(TNI),纤维逐渐膨胀,长度变化较小。当温度达到TNI=72°C时,体积显着减小,94°C时长度减少37%。这表明LCE纤维在超过TNI的温度下可以产生较大的收缩行程。然而冷却到25°C时无法恢复到其初始长度。相比之下,在相同的驱动条件下,CNT纤维几乎没有收缩。这表明复合纤维的驱动是由LCE和CNT纤维的耦合引起的。当复合纤维在高于TNI下电热驱动时,LCE由向列相(i)变为各向同性相(ii)。这种相变化导致LCE/CNT复合纤维解缠,产生扭矩并引起纵向收缩。在此过程中,相邻缠绕靠得更近,从而存储弹性势能。由于LCE的模量(0.27MPa)远低于扭曲的LCE/CNT复合纤维(15.29MPa),因此即使断电后没有外部拉伸,产生的内应力和势能的释放也可以将复合纤维“推”回稳定状态iii。
作者观察到,纤维的扭转稳定结构还表现出重要的无预张力收缩特征。如前所述,线圈通过多个驱动循环分离和稳定。这使得复合纤维能够在纤维内没有张力的情况下提升或拉伸负载。随后,作者详细表征了双绞LCE/CNT复合纤维肌肉的收缩应变、等轴应力和循环致动能力,以评估其致动性能。实验施加的驱动电压为占空比为3%的0.1Hz方波电压,并且用于致动表征的2层纤维含77.9wt%LCE。图3b显示了100μm厚的双绞LCE/CNT纤维在承受0.66g(∼0.84MPa)载荷时收缩应变和收缩速率和所施加电压间的关系。由于温度的升高,双绞纤维的收缩行程随着施加电压的增加而增加,并在14V时达到最大行程(56.9%)。热重分析表明,复合纤维的LCE和CNT组分分别在304和492°C时开始分解。复合纤维的表面温度(使用红外相机监测)表明,收缩行程的降低是由于LCE在高温下的降解,因为CNT主链在致动温度范围内保持化学和电稳定性。不同电压下的平均收缩速率显示在图3b的右轴上。当施加的电压从9V增加到16V时,收缩速率显示出与收缩行程相似的趋势。平均收缩率为189.7%/s,瞬时收缩率高达264.9%/s。双绞LCE/CNT复合纤维的收缩与施加的电压和时间密切相关(Q=U2*t/R)。通过增加施加的电压,但将通电持续时间从0.3s减少到0.05s,在23V时实现了1078%/s的平均收缩率,瞬时收缩率高达1522%/s,远高于先前报道的肌肉纤维的收缩率。
为进一步了解驱动机理,作者在双绞的CNT纤维上涂覆LCE以创建双绞的LCE/CNT复合纤维。由于LCE分子链没有经过扭曲取向,因此将其称为未排列的LCE/CNT复合纤维。图3b表明,在施加的电压范围内,未取向的纤维产生的驱动性能远低于取向的双绞纤维。加热到相变温度会导致嵌入CNT中的液晶元方向和取向的双绞复合纤维的表面偏转(图3a)。这会导致熵增并产生扭矩,导致纤维在解开时收缩。另一方面,非取向LC分子不能产生类似的效果,仅受热膨胀的影响。图3c描述了双绞LCE/CNT纤维收缩的频率依赖性。当施加方波电压(0-11V)和5%占空比驱动纤维时,收缩行程从0.17Hz时的51.3%下降到5Hz时的6.2%。高频下收缩下降,这在以前的热人造肌肉中已经广泛观察到,可以归因于有限的散热。并且在不同频率下测试的双绞纤维的收缩率几乎保持不变。由于加热时间增加,增加方波电压的占空比提升了相同频率下的收缩行程,并提升了频率上限。然而,由于热量积聚,占空比的进一步增加破坏了纤维。
图3d显示了1层和2层LCE/CNT复合纤维的收缩和功率密度作为施加应力的函数。2层复合纤维的收缩和功率密度均高于1层纤维。最大功率密度(7.03W g–1)由2层复合纤维在0.3s内得到。这相当于2.11J g–1的最大工作能力,是4层纤维(7.1J g–1)的0.45倍)和哺乳动物骨骼肌的52倍(0.04J g–1)。性能改进可归因于2层纤维更高的缠绕程度和弹簧指数,这使得2层纤维在相同位移下能够提升比1层纤维更重的负载。作者收集了文献中报道的基于LCE的纤维致动器和人体骨骼肌的工作能力和最大收缩的数据,并绘制在图3e中。
接下来测试了双绞LCE/CNT复合纤维的循环驱动稳定性。为了在自恢复致动模式下运行,作者设计了一个如图3f插图所示的系统。在启动之前,两个砝码m1和m3悬挂在双绞的LCE/CNT复合纤维上(m1=3.03m3)。薄不锈钢板提供m3,用于协助测量驱动过程中纤维的长度变化。另一个重量m2通过滑轮和软螺纹连接到m1(m2=1.88m3)。当电热驱动时,复合纤维提升了m1和m3(图3f插图中的I-II)。当电源关闭时,复合纤维与m3共同恢复,但m1未恢复,因为m1的下降被m2减慢,并导致m1与纤维分离(III)。当m1下降到复合纤维(IV)上的钩子上,开始新的循环。由于提升的重量大于恢复的重量,在完整循环中系统做了>0的净功。图3f显示了在500到32000个循环中实现的收缩行程。结果表明,纤维在自恢复驱动模式下具有优异的循环稳定性。当双绞的LCE/CNT复合纤维以固定长度进行电热驱动时,纤维会产生等轴应力。等轴应力随着输入功率的增加而增加。在4.4MPa的施加应力下,最大等长应力达到17.7MPa(119.6mN),是骨骼肌(∼0.35MPa)的50倍以上,最大应力变化率达到58.9MPa/s。
应用演示
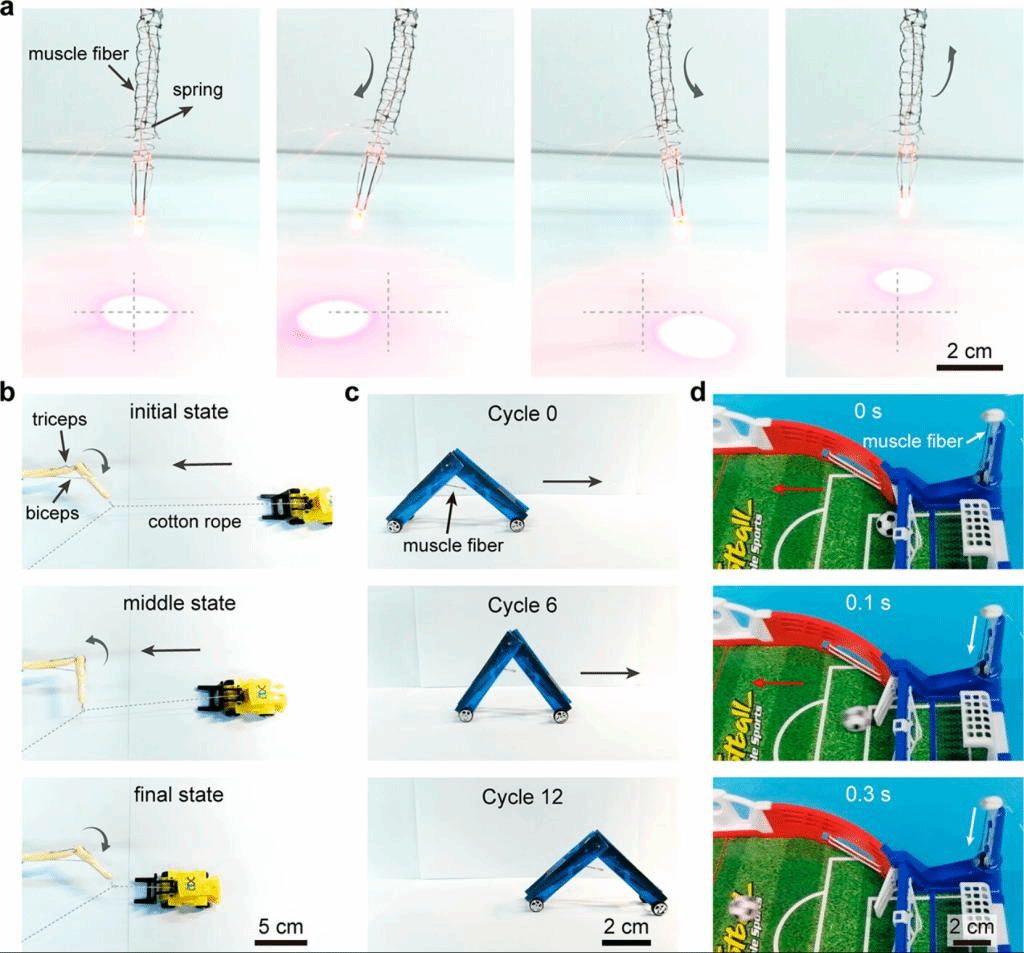
图4、双绞LCE/CNT复合纤维的应用演示。(a)当输入外部电源时,类似内窥镜的机器人由三根双绞LCE/CNT复合纤维驱动。(b)在20V电压下,复合纤维充当二头肌和三头肌完成拉叉车的动作。(c)爬行器在27V,0.1s方波电压下向前移动。(d)点球器由双绞的LCE/CNT复合纤维在30V,0.1s的方波电压下驱动。
内窥镜的弯曲控制是胃肠病学的一个重点研究领域。目前,弯曲主要由电线控制。利用双绞LCE/CNT复合纤维的无预张力驱动特性,通过将三根LCE/CNT复合纤维固定在弹簧内来组装类似内窥镜的机器人。通过控制施加到三根肌肉纤维上的电压,类似内窥镜的机器人可以以各种模式收缩或弯曲(图4a)。此外,双绞的LCE/CNT复合纤维在低电压下可以稳定保持收缩状态。
骨骼肌可以拉动骨骼产生关节运动,人体手臂由二头肌和三头肌之间的对抗关系完成各种运动方式。作者将LCE/CNT纤维连接到3D打印的仿生手臂上来模仿二头肌和三头肌。当电压施加到二头肌时,二头肌收缩,仿生臂产生肘部屈曲以拉动叉车。关闭电源放松纤维,随后再次施加电压,三头肌纤维收缩,仿生臂完成肘部伸展。二者交替工作完成拉叉车的动作(图4b)。
接下来,作者使用三根LCE/CNT人造肌肉纤维构建了爬行器。(图4c)。当施加电压时,双绞LCE/CNT复合纤维将爬行器拉紧。当电压被移除时,爬行器的腿被释放,模仿尺蠖的运动。由于不对称结构设计,当循环施加电压时,履带机器人在14个周期后向前移动了12厘米。
使用两根纤维构建了一个点球器(图4d)。当施加30V、0.1s的方波电压时,纤维迅速收缩,促使进攻板踢足球,从而实现了积累力量和踢球的过程。去除电刺激后,双绞的LCE/CNT复合纤维恢复了原来的长度,攻击板又回到了原来的位置。图4d显示足球最大速度达到0.32m/s。
综上所述,作者制备了一种具有强大的循环工作能力(32000次稳定循环,2.11J g–1),大的收缩行程(56.9%)并且无需应力恢复的双绞人工肌肉纤维。LCE层和扭曲的CNT纤维芯之间的机械耦合实现了重要的驱动特性。该材料的外部无应力恢复和无张力驱动可以大大促进其应用。应用演示表明,目前的人造肌肉纤维作为驱动单元,无需其他附件进行恢复,这是人造肌肉纤维所必需具备的能力。作者的研究探索了医疗设备和软机器人可能的发展方向。
文字 丁聪
审核 叶曦翀
参考文献:DOI: 10.1021/acsnano.3c03942
https://pubs.acs.org/doi/10.1021/acsnano.3c03942