ACS Appl. Mater. Interfaces | 集成可拉伸电子元件液晶弹性体的多材料打印
今天与大家分享一篇发表在ACS Applied Materials & Interfaces上的文章,标题是“集成可拉伸电子元件液晶弹性体的多材料打印”。本文的通讯作者为卡内基梅隆大学人机交互研究所的Lining Yao教授。
液晶弹性体(LCE)是一类将液晶的有序方向与弹性体的性能相结合并表现出形状记忆性能的材料。在最近的工作中,LCE已经使用3D打印等增材制造技术进行图案化,扩大了这些材料可以实现的形状范围,称为“4D打印”。在印刷过程中使用紫外线(UV)来引发LCE的光聚合,将介晶和链锁定,并根据印刷方向对齐单个LCE纤维。因此,对收缩方向的控制分辨率仅受打印喷嘴直径和3D打印机分辨率的限制。通过这种方法配置分层LCE,可以实现由取向方向决定的运动。
尽管取得了进展,但温度或光致动之外的其他致动方式研究刚刚起步。通过在LCE中引入电子元件,可以使LCE将计算、传感和直接可控致动整合到单个架构中。虽然LCE本质上不导电,但已经出现了引入金属掺杂物来为LCE致动器供电的工作。金属线在某些方向上具有柔韧性和可拉伸性,但局部相容性差,从而导致收缩过程中分层。纳米颗粒复合材料需要大量的填充才能导电,这会导致刚度或机械滞后增加,从而干扰LCE的可逆性和致动行程。液态金属(LM)合金,如共晶镓-铟(EGaIn),具有高导电性,本质柔软,能够与LCE协同变形,并且在多次致动循环中不会老化。但目前尚未实现在LCE中引入电子元件。
在这项工作中,作者介绍了一种通过通用DIW方法打印EGaIn-Ag-SIS墨水和LCE以创建形状可重构的4D结构的数字制造方法(图1)。首先,根据经验调整LCE流速参数,使导电油墨产生光滑的表面。接下来在关闭紫外光的情况下添加最后一层LCE用以改善LCE基板的最终表面粗糙度(平均表面高度偏差<10μm)。LCE样品用紫外光固化,并且顶部有EGaIn-Ag-SIS墨水图案时,导电墨水就可以用作表面贴装器件(SMD)和其他电气元件的电路线,或作为焦耳加热元件。
为了展示这种多材料打印方法的多功能性,作者展示了LCE和EGaIn-Ag-SIS导电墨水结合的能力。图1中的具有导电电路的手性增大样和泰迪熊结构很难通过传统的LCE制造方法创建。基于LM的墨水还可用于提供可通过红外(IR)相机观察到的结构局部加热。还演示了将LCE焦耳加热致动和SMD相结合,用于制备红外通信设备和爬行机器人
油墨合成、表征和打印
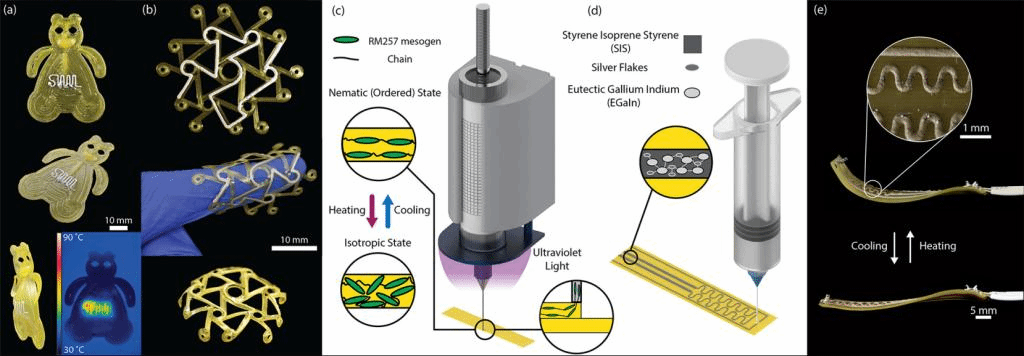
图1、多材料打印过程概述。(a)4D打印液晶弹性体(LCE)泰迪熊,含有集成焦耳热迹线。(b)具有任意图案导电墨水的手性增大样结构。图底部是致动状态,导电墨水在内侧。(c)LCE的4D打印。当墨水离开喷嘴时,介晶和分子链沿印刷方向对齐,并使用紫外(UV)光锁定。(d)EGaIn-Ag-SIS墨水的3D打印。导电油墨直接在LCE基材上图案化。(e)带有红外LED的LCE弯曲致动器。弯曲由创建0°–90°配置的多层结构引入。导电墨水可以与LCE一起收缩,为ICs提供持续的加热。
使用一步迈克尔加成反应合成LCE油墨,将RM-257和正丁胺以1:1.1的比例与光引发剂混合。DSC显示其TNI约为80-90°C。通过1:1.24:3的重量比例混合SIS嵌段共聚物溶液,银片和液态金属获得EGaIn-Ag-SIS油墨。对每种油墨进行流变学表征,以确定它们是否适合DIW。每种油墨以10–1到102 rad s–1的频率,10–1到101 s–1的剪切速率测量粘度。结果表明,由于损耗模量G′′较大,它们在印刷条件下的行为更像液体,并发生了剪切稀化。因此该油墨适合打印。在图1b中,LCE油墨被装入金属储液罐并使用加热的挤出机印刷。挤出机必须足够热,以降低油墨的粘度,同时不会导致材料过渡到各向同性状态。由于喷嘴和基材之间产生的剪切应力,介晶和链沿印刷方向对齐。使用安装的紫外(UV)光源固定取向10小时,导电油墨直接在固化的LCE基材顶部图案化。
LCE表面平坦化
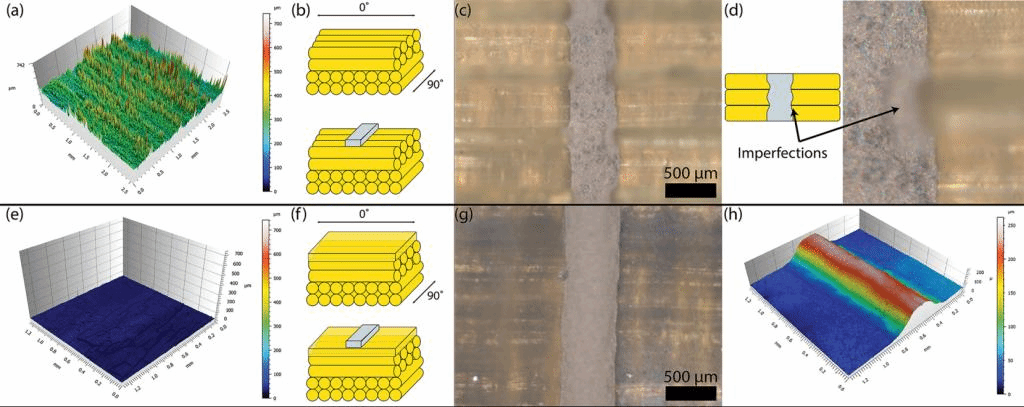
图2、含导电墨水的印刷LCE表面的共聚焦显微镜测试。(a)使用经验参数对打印的LCE进行三维表面重建。(b)复合结构的逐层结构。(c)印刷造成的含缺陷的共聚焦显微镜图像。(d)放大共聚焦图像以突出显示导电墨水中的缺陷。(e)使用额外的未固化LCE层进行3D表面重建,显示整个样品区域的偏差小于3μm。(f)复合结构的逐层构造,并附加一层最初未固化的LCE。(g)均匀表面的共聚焦图像。(h)三维表面重建,导电迹线宽度一致。
多材料打印的重点之一是在不同材料间实现平滑的界面(图2)。使用经验参数制备的带和不带导电墨水的LCE致动器表面如图2a–d所示。虽然表面基本均匀,但可能会出现小缺陷。在图2c,d中,共聚焦显微镜图像显示由于LCE表面的不规则性,导电油墨没有实现宽度一致的图案化,这会在器件上产生更高的电阻。为了改善表面平整度,在结构顶部打印了一层额外的LCE。该LCE层不受紫外线的影响,延迟了光聚合。正因为如此,材料可以在短时间内以非常粘稠的液体形式流动,并有助于填补可能由前几层缺陷形成的任何间隙/裂缝。其结果可以在图2e–h中看到,表面形貌仅显示出很小的高度偏差(<10μm)。共聚焦显微镜下未观察到导电油墨轮廓中的明显缺陷(图2g,h)。因此,这种“平坦化”层提高了导电油墨的印刷适性。因此,在使用导电油墨制造任何致动器时,建议在关闭紫外线的情况下多打印一层,以纠正打印过程中可能发生的任何问题。
制造过程的可重复性
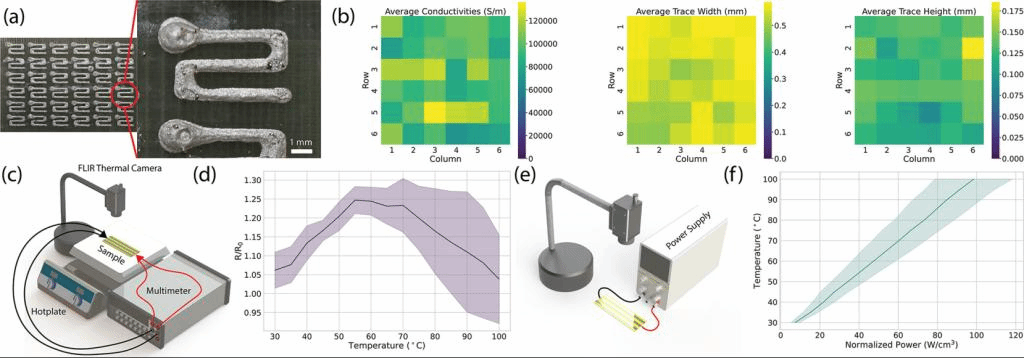
图3、LCE基材上导电油墨的表征。(a)重复性测试的打印示例。(b)重复性测试结果。(c)使用热像仪、热台和万用表测量电阻随温度变化的实验装置。(d)n=9条导电迹线的电阻随温度的变化。线条表示平均值,阴影区域表示标准偏差。(e)测量温度作为归一化输入功率函数的实验装置。(f)与功率输入呈线性关系的可实现温度。
为了证明导电油墨印刷过程的可重复性,在LCE基材上印刷了108条导电迹线。利用Pouillet定律来计算体积电导率,所有样品的平均值约为105 S m–1,某些样品的电导率存在偏差,可能是由于导线矩形横截面的微小变化无法准确测量。印刷床部分区域存在约100μm的高度差,造成了略微的不均匀。
导电油墨的热行为
研究了该油墨在LCE转变温度及其周围的行为。使用FLIR红外热像仪测量印刷在LCE致动器上的导电油墨迹线的温度。在三个加热循环结束时测量电阻,以减少材料被加热并被底层LCE基板拉伸时可能发生的Mullins效应。电阻的变化除以每条迹线的初始电阻结果如图3d所示。每条迹线的电阻最初略有增加,然后在样品达到TNI后下降到接近原始值。例如,观察到第一个致动周期和第三个周期之间初始电阻从1.708变为0.724Ω,最大变化为0.984Ω。这仍然在数字电路的可行性范围内,表明该电路表现良好。
使用相同的九个样品进行实验,以确定达到特定温度所需的输入功率(图3e)。将每条迹线连接到电压控制电源,允许焦耳加热1分钟以建立准稳态分析。当观察到每条迹线通过热像仪达到所需的离散温度时,记录输入功率。然后体积归一化(图3f)。其线性关系表明,该LCE配方的转变温度可以通过这种可拉伸电路实现。
导电油墨对LCE的附着力
进行了90°剥离测试,以确定在施加的负载下,油墨是否会从LCE表面分层。所有样品的内聚力在加载条件下粘附失败之前都失效了。该测试表明墨水可以很好地结合LCE表面,所有LCE基材和印刷油墨之间的界面处都没有观察到分层。
展示
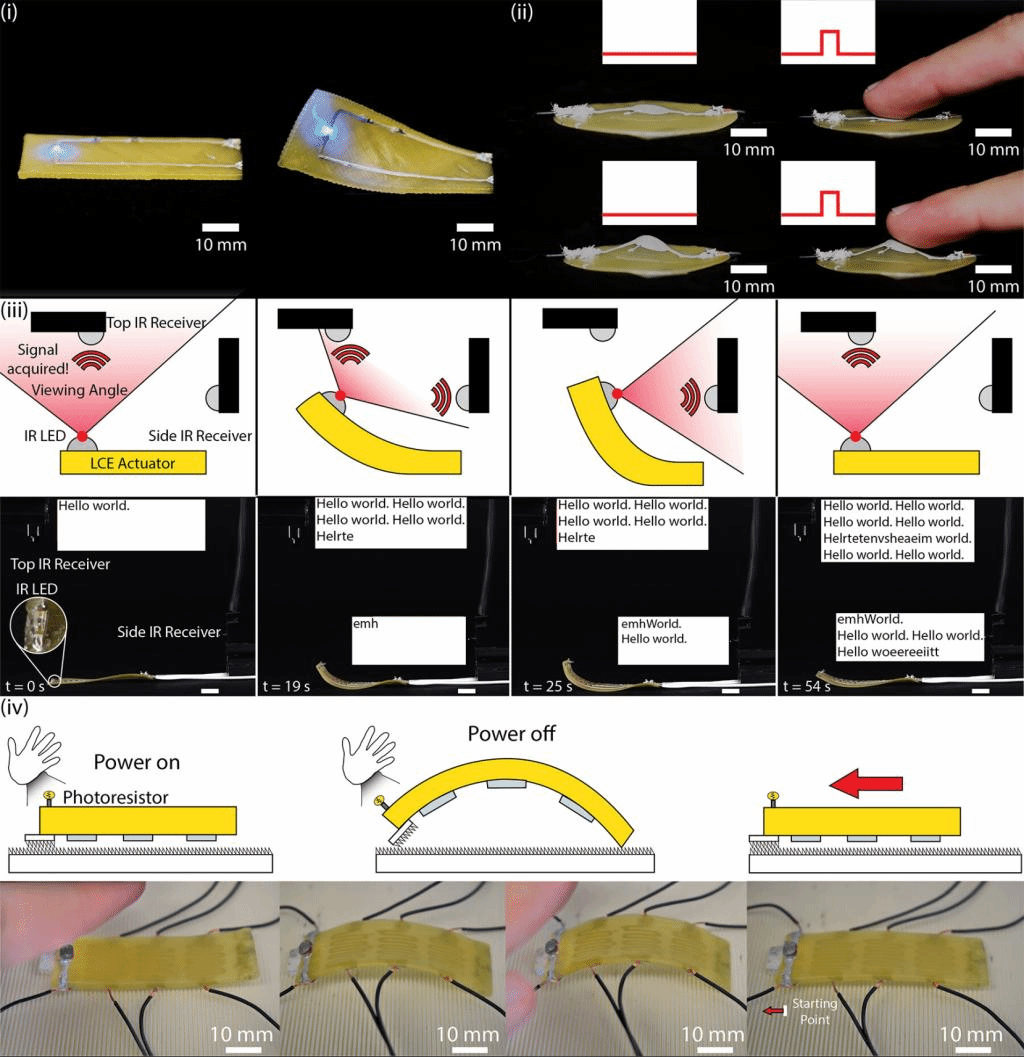
图4、使用LCE和导电墨水制造可重构设备。(i)带有SMD电阻器和LED的扭曲致动器,可通过90°扭转来工作。(ii)一个圆形LCE,可弹出并形成带有电容式触摸传感器的锥体。(iii)带有红外LED的LCE弯曲致动器,该致动器向两个接收器闪烁莫尔斯电码信号。当致动器弯曲时,LED的视角会发生变化,进而改变信号的方向。(iv)带有开/关光敏电阻的LCE爬行器。使用3D打印的脚,可以在加热时储存能量,然后在冷却时向前拉动。
为了证明这种制造方法的多功能性,作者制造了几种具有不同行为的LCE致动器,并印刷了具有各种用途的导电迹线(图4)。在第一个示例中,演示了带有表面贴装电阻器和LED的扭曲LCE致动器。尽管进行了90°旋转,但LED仍保持与静止时一样明亮。在第二个示例中,变形为锥体的LCE致动器提供电容感应。通过导电墨水的圆形打印,构建了用于传感的导电垫。即使LCE在致动过程中产生应变,电容式传感器仍然以类似的信噪比工作。
除了为SMD和传感器提供电路外,导电油墨还可以作为焦耳热迹线。如第三个示例,带有红外(IR)LED的LCE弯曲致动器通过电源加热。红外LED由导电墨水迹线供电,并连接到Arduino微电流控制器与弯曲致动器。通过使用红外LED增强设备,可以实现广播消息“HelloWorld”。当电源打开时,热量开始积聚在设备上,导致弯曲。
作者还制造了具有集成光敏功能的LCE软机器人爬行器(图4)。致动器两侧都有导电墨水图案,焦耳加热电路在底部,电子设备在上侧。致动器可以通过弯曲向前拖动自身移动。开发了一种向致动器供热的简单开/关控制方案,爬行运动由集成光敏电阻检测到的光触发。致动器启动后,用户将手放在光敏电阻上以调暗光线,激活微控制器允许加热器获取电源,致动器受到加热并卷曲,放松时向前前进。
综上所述,作者利用LCE和导电LM油墨的多材料印刷设计由焦耳热致动并增强表面结合电子设备的致动器。根据经验调整了打印参数,并添加了未取向的附加LCE层。导电油墨在致动LCE所需的高温下可以正常工作,而不会产生较大的电阻变化;所需温度可以通过导电墨水生成的焦耳热实现,焦耳热与输入功率呈线性关系。这种方法可能对软机器人的应用产生潜在影响。
文字 丁聪
审核 叶曦翀
参考文献:DOI:10.1021/acsami.2c23028
https://pubs.acs.org/doi/10.1021/acsami.2c23028